卡尔曼滤波简介
卡尔曼滤波(Kalman Filter, KF) 是一种优化估算算法(Optimal Estimation Algorithm), 常用于制导与导航控制系统、计算机视觉系统和信号处理领域。 实际作用主要是:从受误差影响的传感器测量中估算出最佳的系统状态。
- 什么是卡尔曼滤波?
- 可以在任何含有不确定信息的动态系统中使用卡尔曼滤波, 对系统下一步的走向做出有根据的预测,即使伴随着各种干扰, 卡尔曼滤波总是能指出真实发生的情况;
- 在连续变化的系统中使用卡尔曼滤波是非常理想的, 它具有占内存小的优点(除了前一个状态量外,不需要保留其它历史数据), 而且速度很快,很适合应用于实时问题和嵌入式系统。
- 算法的核心思想:
- 根据仪器的 当前测量值 和 上一刻的预测值 和 误差值,计算得到 当前的最优量,再 预测下一刻的量;
- 核心思想比较突出的观点是把误差纳入计算,而且分为 预测误差 和 测量误差 两种,统称为噪声;
- 核心思想还有一个非常大的特点是: 误差独立存在,始终不受测量数据的影响。
状态观察器
状态观察器(State Observers) 用于优化估算一些无法直接测量但可以间接测量的状态。
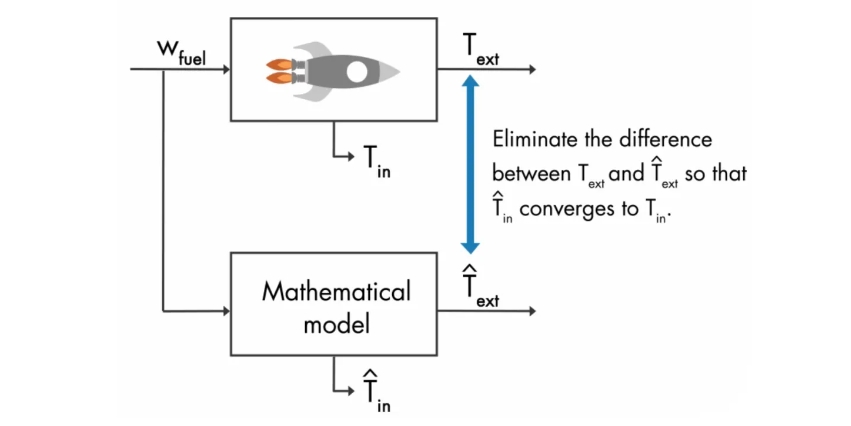
场景-观察火箭喷射器的内部温度
现在有一只火箭要从地球飞往火星,火箭使用液态氢作为燃料,但过高温度会导致火箭喷射器的机械部件损坏, 因此监控喷射器内部温度就十分重要,可传感器不支持放置在喷射器内部,否则会被融化掉。 但可以在喷射器外部的放置温度传感器,间接测量内部温度,但 间接测量值 和 真实值 存在 误差, 为此,可以 使用状态观察器去基于间接测量值估算出真实值。
应用-状态观察器
状态观察器怎么 “观察” 出火箭喷射器的内部温度状态呢?
已知火箭燃料流量是 $W_{\text{fuel}}$,测量的外部温度是 $T_{\text{ext}}$,
假设有个 数学模型 可以基于 $W_{\text{fuel}}$ 估算出外部温度 $\hat{T}_{\text{ext}}$,
那么,只要将估计的外部温度 $\hat{T}_{\text{ext}}$ 与测量的外部温度 $T_{\text{ext}}$ 相匹配上,
数学模型就会收敛到 真实系统的模型,相应地,数据模型估算的内部温度 $\hat{T}_{\text{in}}$ 也能逼近真实的内部温度。
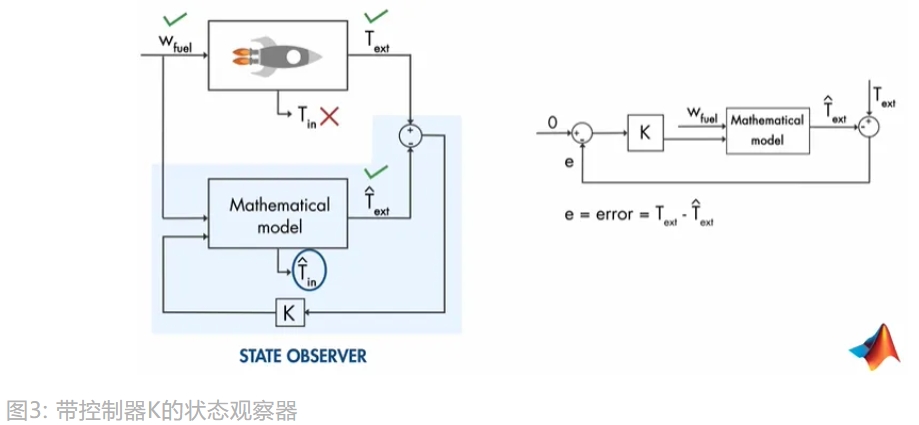
可以通过下图的控制器 $K$,控制 测量 和 估计 的外部温度之间的误差为 0。
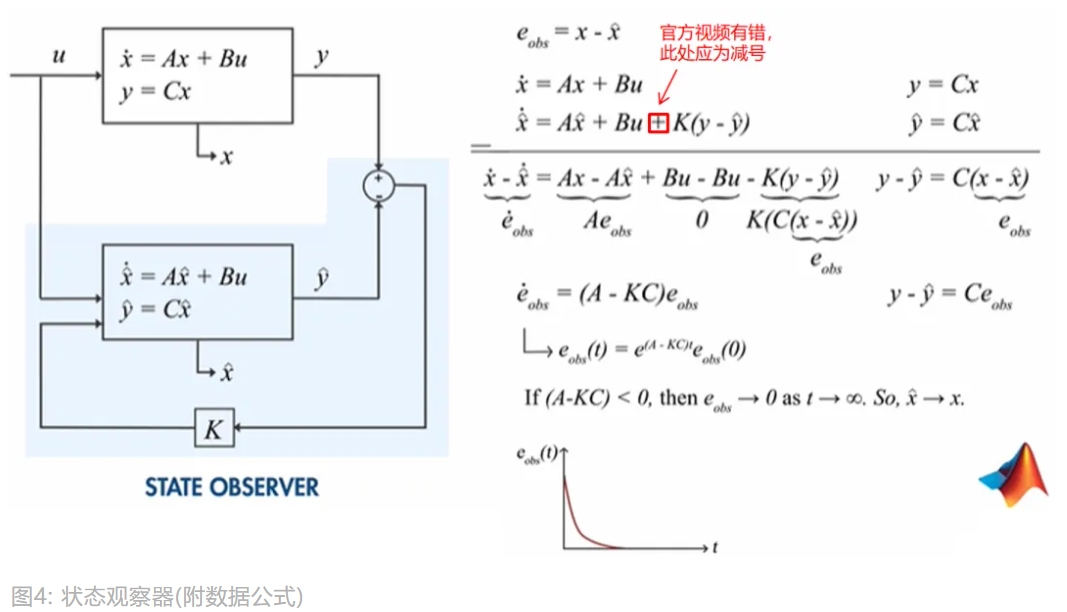
现在,透过数学公式来解释下状态观察器,如下图。为了方便理解公式,先解释下变量:
$u$:控制向量。这里是燃料流量,它控制了温度$B$:控制矩阵$A$和$C$:矩阵$A$和$C$$\dot{x}$:内部温度对时间的导数$x$和$y$:测量的内部温度和外部温度- 加了
^的变量都是预测的变量
由于官方视频直接带过了
$e_{\text{obs}}(t)$的求解过程,这里进行补充下, 由于$\dot{e}_{\text{obs}}$是内部温度误差对时间的导数, 所以如果要获取内部温度误差随时间变化的函数$e_{\text{obs}}(t)$, 只要微分就好了,公式拆解如下:
$$\dot{e}_{obs}(t)=d(e_{\text{obs}}(t))$$$$d(e_{\text{obs}}(t)) = (A-KC)e_{\text{obs}}(t)$$结合视频说
$e_{\text{obs}}(t)$是个指数函数,因此可以联想到:
$$\begin{align} e_{\text{obs}}(t) &= (A-KC)e^{(A-KC)t} \\ &= (A-KC)e^{(A-KC)\times 0} \times e^{(A-KC)t} \\ &= e_{\text{obs}}(0)\times e^{(A-KC)t} \\ &= (A-KC)e^{(A-KC)t} \end{align}$$现在再对
$e_{\text{obs}}(t)$求导,可得到上图的结果:
$$\begin{align} \dot{e}_{\text{obs}}(t) &= \frac{d((A-KC)e^{(A-KC)t})}{dx} \\ &= (A-KC)(A-KC)e^{(A-KC)t} \\ &= (A-KC)e_{\text{obs}}(t) \end{align}$$
现在知道 $e_{\text{obs}}(t)$ 是一个指数函数,
$(A-KC)$ 是控制指数函数衰减的系数,但不能没有 $KC$ 项,
因为在状态观察器中,核心的控制变量是 $K$,由 $K$ 来调控误差函数的衰减速度。
最佳状态估计器
最佳状态估计器(Optimal State Estimator):从受误差影响的传感器测量中估算出最佳的系统状态。 卡尔曼滤波本身便是一个最佳状态估计器,它跟前面讲的状态观察器差不多, 不同的是卡尔曼滤波是为 随机系统 设计的。
区别如下:
-
状态观察器(State observer)、动态系统(Deterministic system):
$$\hat{x}_{k+1} = A\hat{x}_{k}+Bu_{k}+K(y_{k} - C\hat{x}_{k})$$ -
卡尔曼滤波(Kalman filter)、随机系统(Stochastic system):
$$\hat{x}_{k} = A\hat{x}_{k-1}+Bu_{k}+K_{k}(y_{k} - C(A\hat{x}_{k-1} + Bu_{k}))$$
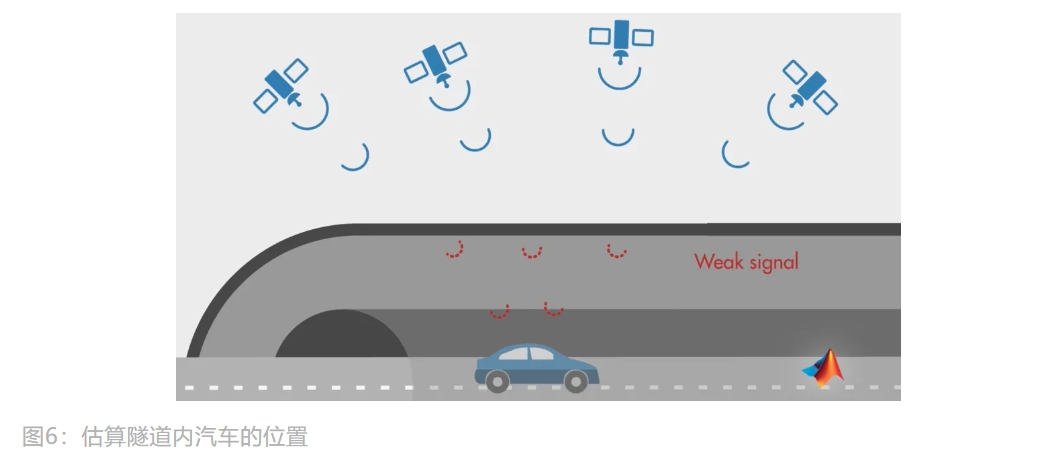
场景-估算隧道内汽车的位置
如果汽车进入隧道,汽车上的 GPS 接收器很难接收到卫星信号。 如果在周围有高建筑物遮挡的街道上行驶,因为多路径效应(Multipath Effect,即信号失真), 导致定位噪声很大。可以简单看作这是一个 传感器测量受误差影响 的案例, 如果想估算出汽车真实的位置状态,建议使用卡尔曼滤波。
应用-最佳状态估计器
接下来,看下最佳状态估计器是如何估算汽车下一时间点会定位在哪的。 如下图所示,卡尔曼滤波的目标是将 GPS 测量值(Measurement) 和 数学模型预测值(Prediction) 相结合, 去找到 汽车位置的最优估计状态(即汽车位置)。
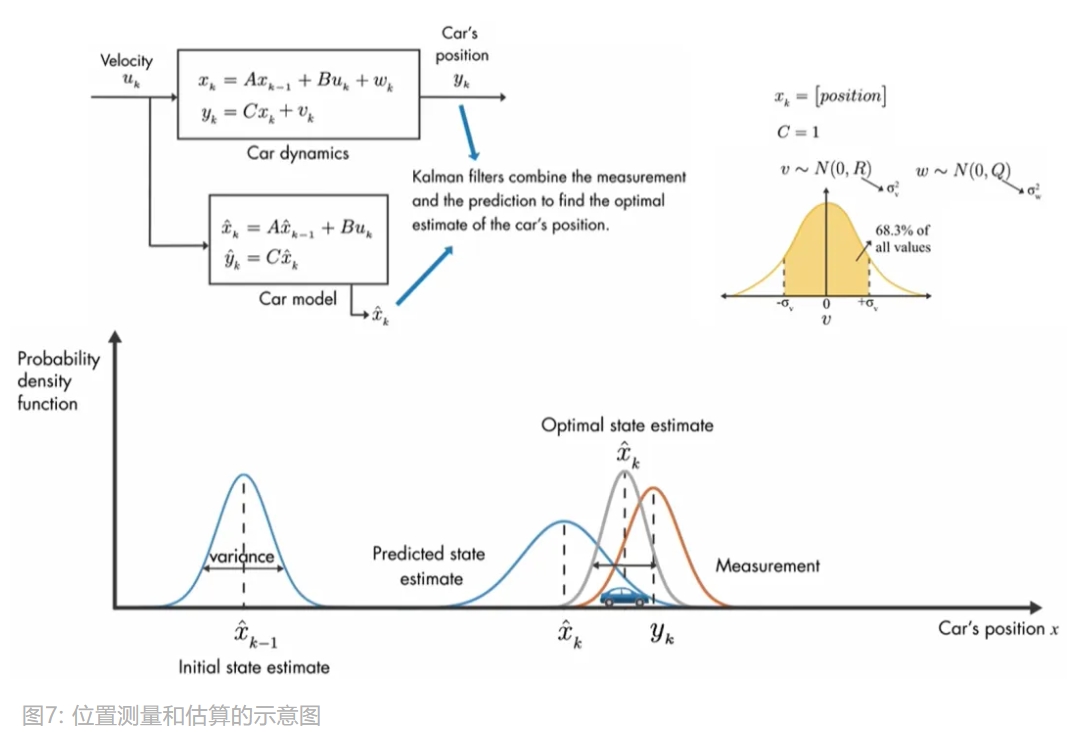
同样地,我先解释下图中的变量:
$u_{k}$:时刻$k$下的控制向量。这里是速度$x$和$y$:测量的位置和真正的位置$w$:过程噪声,随机变量,可以代表风的影响或汽车速度的变化。 服从正态分布$w \sim N(0, Q)$,$Q$为协方差$v$:测量误差,随机变量,服从正态分布$v \sim N(0, R)$,$R$为测量值的协方差,由于这里是单输出系统, 协方差$R$等同于测量误差的方差$A$、$B$和$C$:矩阵变量- 加了
^的变量都是预测的变量
在上图中,用了概率密度函数去描述卡尔曼滤波的中心思想,
假设用数据模型得到时间点 $k-1$ 下汽车状态 $\hat{x}_{k-1}$,
由于是预估值,所以会存在一定的方差,
现在使用汽车数学模型再次预测时间 $k$ 下的位置 $\hat{x}_{k}$,
由于误差累积,$\hat{x}_{k}$ 会有更大方差,同时也可以获取到测量值 $\hat{y}_{k}$。
现在有了 预测($\hat{x}_{k}$) 和 测量($y_{k}$),
便可以通过概率密度函数相乘的方式得到最优状态估计函数,
而新的概率密度函数的平均值便是最优状态估计值(即综合测量值和预测值得到的最佳定位点)。
最佳状态估计器算法
现在,来详细看下卡尔曼滤波是如何实现最佳状态估计器算法。如下图所示,先解释下各变量:
$\hat{x}^{-}$:先验状态,即预测值$\hat{x}$:后验状态,即最佳状态估计值$P^{-}$:先验协方差,即预测值的协方差$P$:后验协方差,即最佳状态估计值的协方差$R$:测量值噪声的协方差$Q$:过程噪声的协方差$K$:卡尔曼增益$A$、$B$和$C$:矩阵
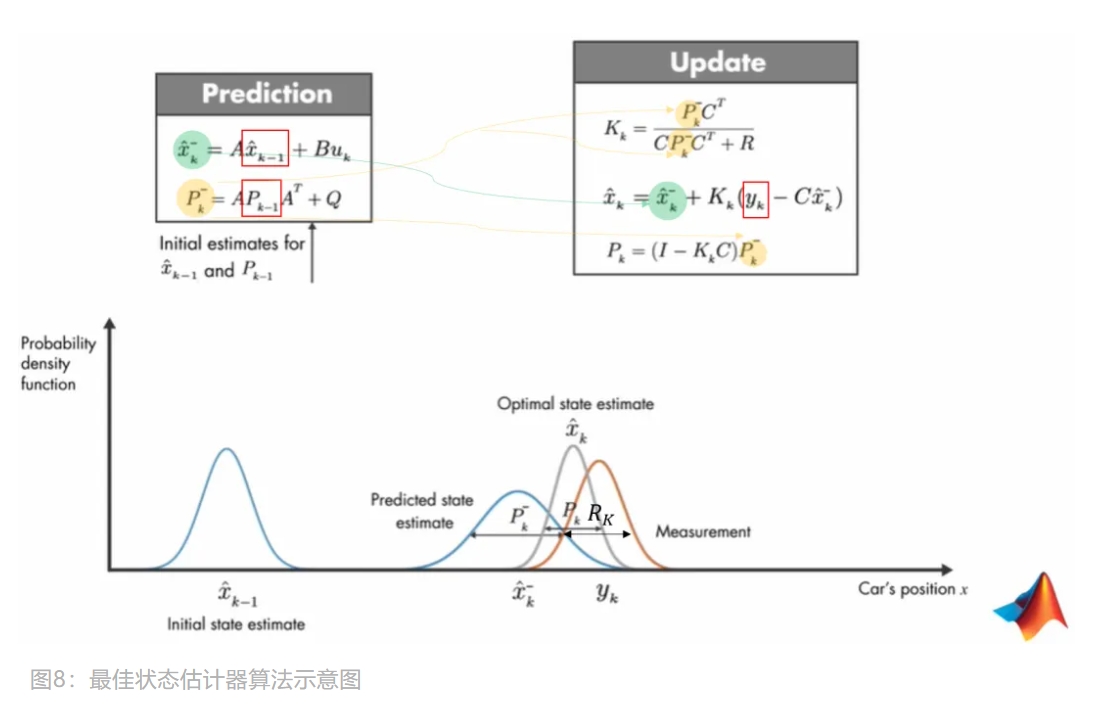
卡尔曼滤波步骤如下:
- 初始化
$\hat{x}_{k-1}$、$P_{k-1}$、$u_{k}$、$A$、$B$、$C$、$Q$和$R$。 - 先执行 Prediction,得到
$\hat{x}_{k}^{-}$和$P_{k}^{-}$。 - 将 Prediction 结果输入到 Update 模块,求得
$K_{k}$,再基于$K_{k}$求最佳估计值$\hat{x}_{k}$。 - 将 Update 求出的
$P_{k}$和$\hat{x}_{k}$再输入给 Prediction。 - 重复以上步骤,不断调整卡尔曼增益,使更新后的状态值
$\hat{x}$误差协方差$P$最小。
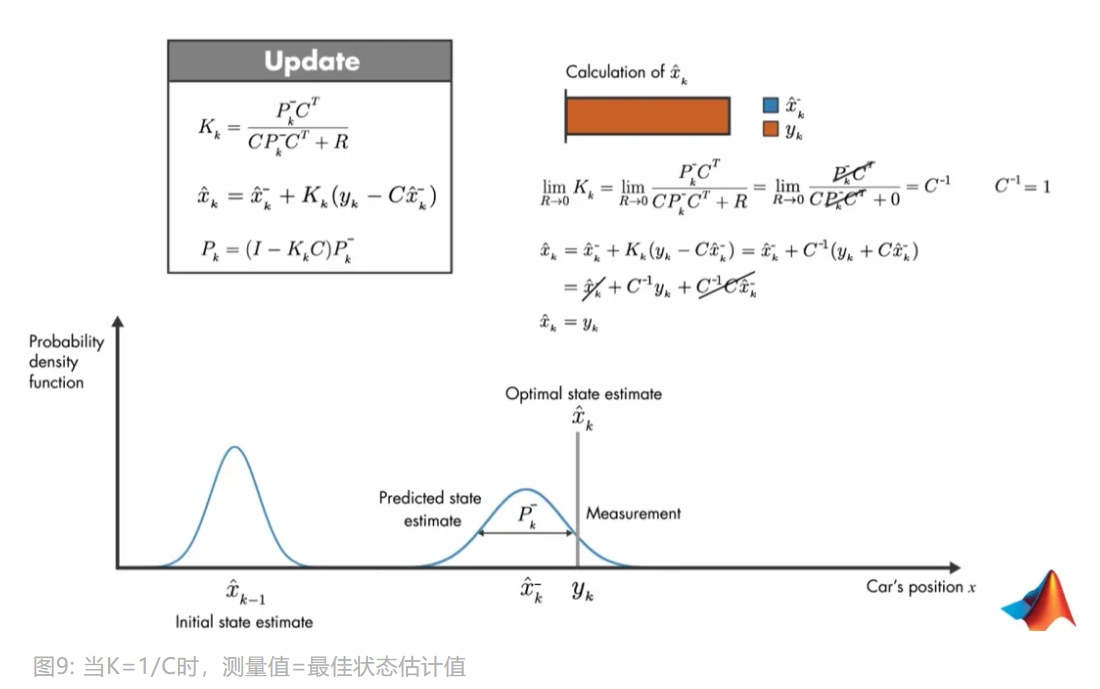
最后,深入看下卡尔曼增益 K 是怎么权衡测量值和预测值的决策比重的:
- 当
$K=1/C$时,测量值等于最佳状态估计值
若测量值等于最佳状态估计值,说明测量值协方差 $R$ 趋向于 0,那么如下图所示。
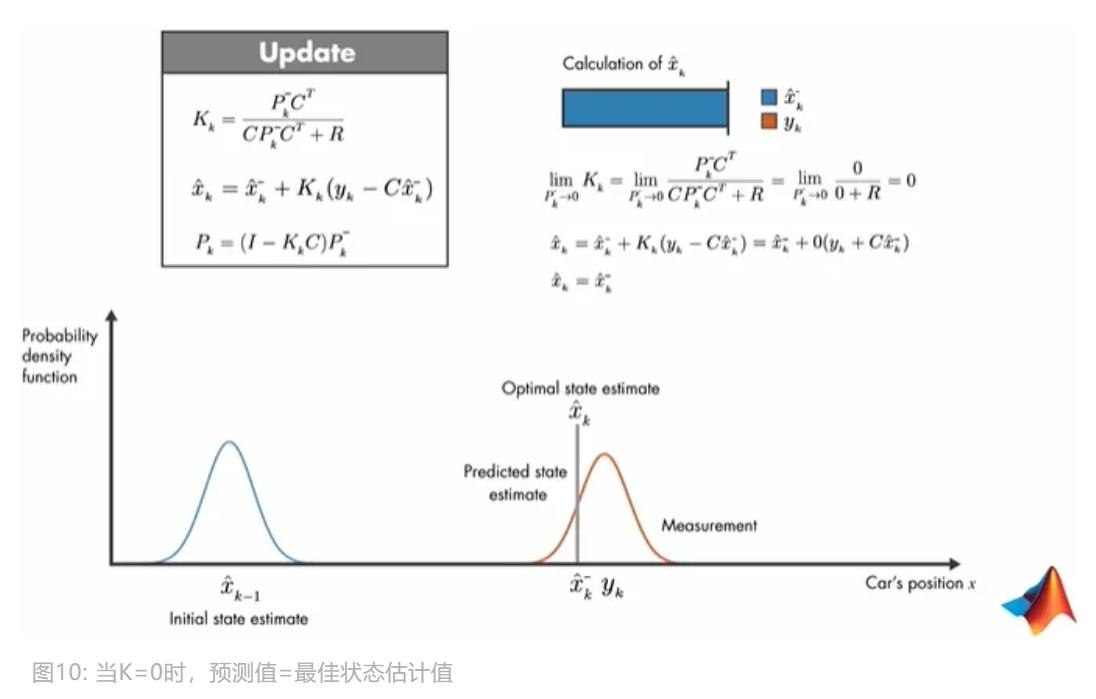
- 当
$K=0$时,预测值等于最佳状态估计值
若预测值等于最佳状态估计值,说明预测值协方差趋向于 0,那么如下图所示。
其他滤波算法
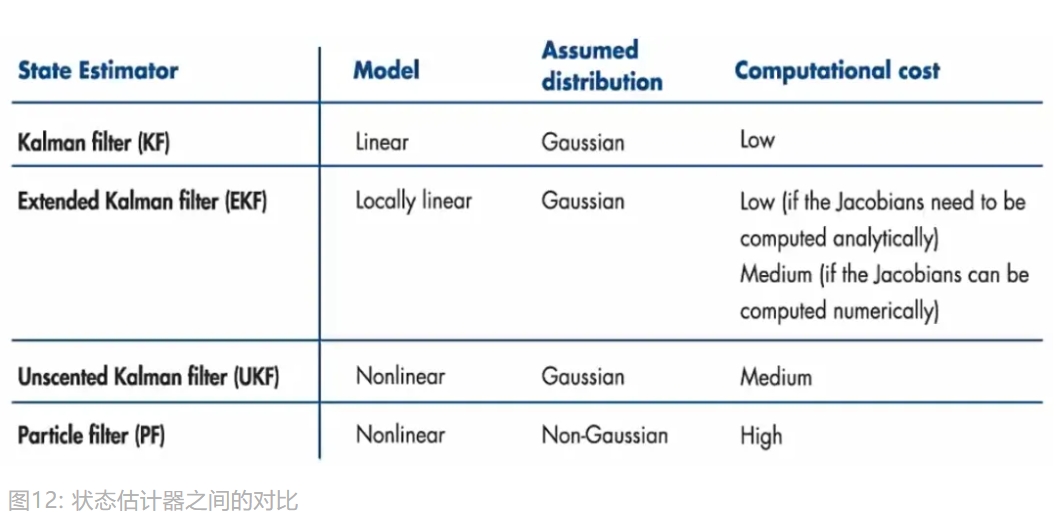
卡尔曼滤波是线性的,而实际中,很多数据模型是非线性的,此时可以考虑扩展卡尔曼滤波, 另外,有兴趣的朋友也可以去了解无迹卡尔曼滤波和粒子滤波,如图12所示。
Python API
import numpy as np
import matplotlib.pyplot as plt
import simdkalman
def make_shifted_matrix(vec):
"""
Define shifted matrix
"""
matrix = []
size = len(vec)
for i in range(size):
row = [0] * i + vec[:size-i]
matrix.append(row)
return np.array(matrix)
def make_state_vector(T, size):
"""
Define state vector
"""
vector = [1, 0]
step = 2
for i in range(size - 2):
if i % 2 == 0:
vector.append(T)
T *= T / step
step += 1
else:
vector.append(0)
return vector
def make_noise_vector(noise, size):
"""
Define noise vector
"""
noise_vector = []
for i in range(size):
if i > 0 and i % 2 == 0:
noise *= 0.5
noise_vector.append(noise)
return noise_vector
# KF 的参数,可用 optuna 去做搜索
T = 1
size = 4
noise = 2.1714133956113952e-06
obs_noise = 1.719317114286542e-05
# 获取 State transition matrix A
vec = make_state_vector(T, size)
state_transition = make_shifted_matrix(vec)
# 获取 Process noise (state transition covariance) matrix Q
process_noise = np.diag(make_noise_vector(noise, size)) + np.ones(size) * 1e-9
# 获取 Observation model (measurement model) matrix C
observation_model = np.array([[1] + [0] * (size - 1)])
# 获取 Observation noise (measurement noise covariance) matrix R
observation_noise = np.diag([obs_noise] * 1) + np.ones(1) * 1e-9
kf = simdkalman.KalmanFilter(
state_transition = state_transition,
process_noise = process_noise,
observation_model = observation_model,
observation_noise = observation_noise
)
# 随机化一组样例数据
x = np.linspace(0, 10, 100)
y = np.sin(x)
data = np.array([v + np.random.normal(0.1, 0.3, 1) for v in y])
data = data.reshape(1, len(data), 1)
smoothed = kf.smooth(data)
smoothed_data = smoothed.states.mean[0, :, 0]
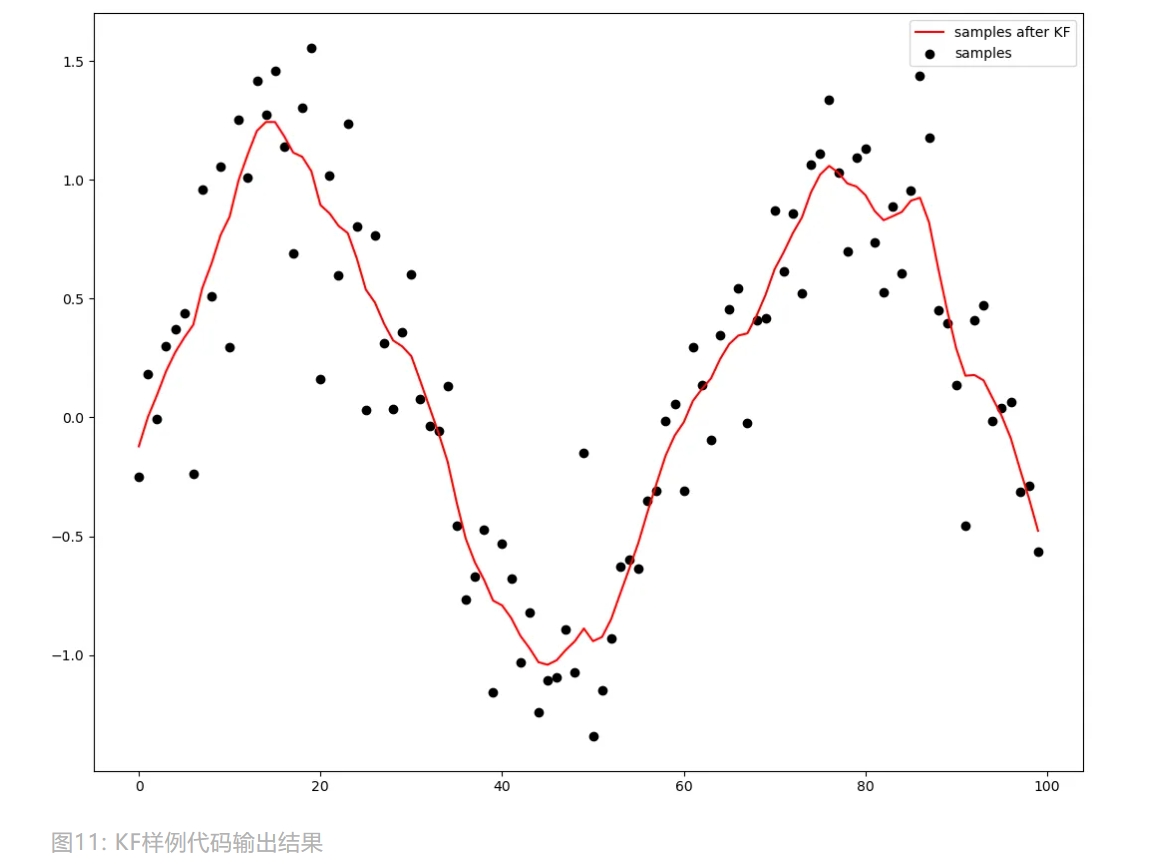
# 可视化
fig = plt.figure()
plt.scatter(range(len(data[0,:,0])), data[0,:,0], c = 'black', label = 'samples')
plt.plot(range(len(smoothed_data)), smoothed_data, c = 'r', label = 'samples after KF')
plt.legend()
plt.show()
参考
- 卡尔曼滤波
- MathWorks 制作的《Understanding Kalman Filters》视频
- Bzarg 写的《How a Kalman filter works, in pictures》博文
- Automatic Addison 写的《Extended Kalman Filter (EKF) With Python Code Example》博文
- 《如何通俗并尽可能详细地解释卡尔曼滤波?》
- 《Understanding Kalman Filters》- MathWorks,系列视频
- 卡尔曼滤波库 simdkalman Github
- 《Kalman filter - hyperparameter search with BO》-Trinh Quoc Anh,代码