PID 控制算法
wangzf / 2022-12-01
PID 算法简介
PID 算法应用
PID 控制算法应该是非常广泛的控制算法,小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等, 都可以使用 PID 控制,能够很好地保证系统的稳定性
具体来说,PID 算法可以用来控制温度、压强、流量、化学成分、速度等, 还有汽车的定速巡航、伺服驱动器中的速度位置控制、冷却系统的温度、液压系统的压力等
PID 算法原理
PID(Proportion Integration Differentiation)其实就是指比例(Proportion)、积分(Integration)、微分(Differentiation)控制
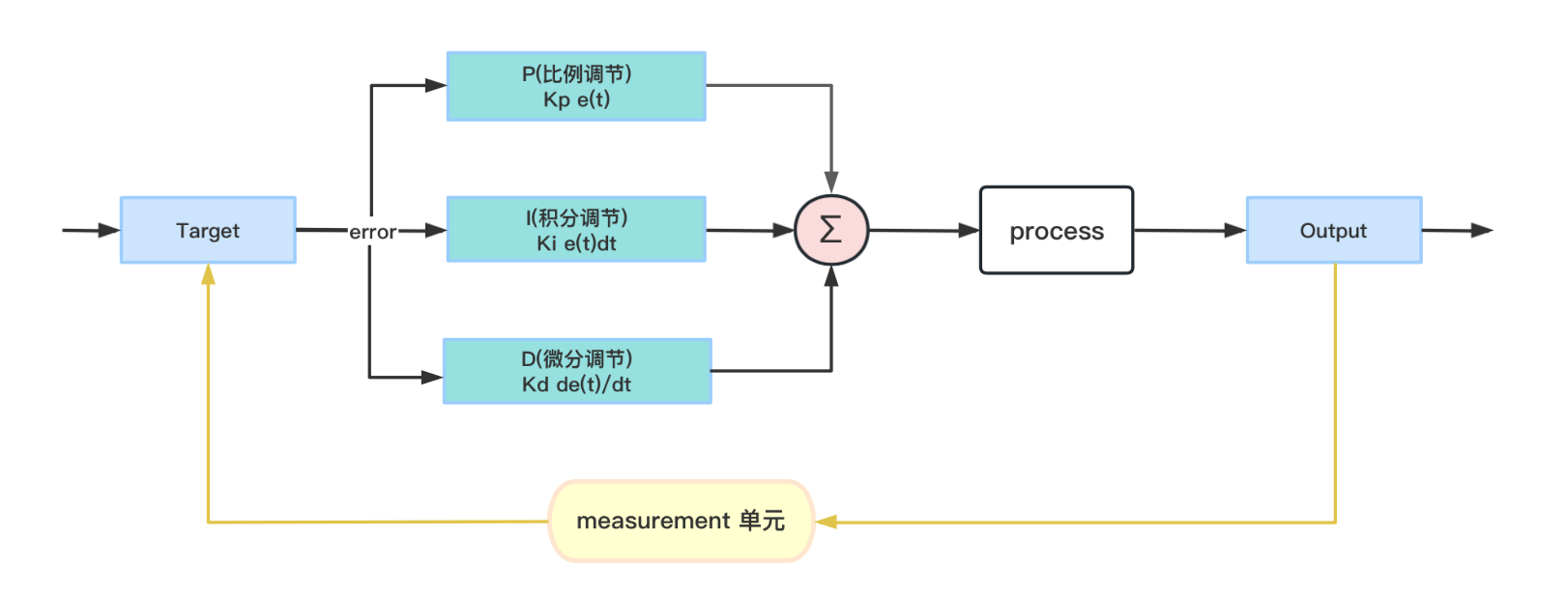
PID 的基本原理是,当得到系统的输出后,讲输出和输入的差值作为偏差,再将这个偏差信号经过比例、积分、 微分三种运算方式叠加后以一定的方式加入到输入中,从而控制最终的结果,达到想要的输出值
假设某时刻偏差为 ,则 PID 数学公式表示:
其中:
- 为比例系数
- 积分时间
- 微分时间
其中括号内的:
- 第一项是比例项
- 第二项是积分项
- 第三项是微分项
很多情况下,比如要在计算机上实现,仅仅需要在离散的时候使用,则控制可以化为:
其中
- 比例系数
- 增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。但是比例系数过大会使超调量增大, 振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定
- 比例控制不能消除稳态误差
- 积分系数
- 使系统消除稳态误差,提高无差度
- 积分控制的作用是,只要系统有误差存在,积分调节就进行,积分控制器就不断地积累, 输出控制量,直至无差,积分调节停止,积分调节输出一常值。因而,只要有足够的时间,积分控制将能完全消除误差, 使系统误差为零,从而消除稳态误差
- 积分作用的强弱取决于积分时间常数 , 越小,积分作用就越强, 积分作用太强会使系统超调加大,甚至使系统出现振荡,反之 大则积分作用弱。加入积分调节可使系统稳定性下降,动态响应变慢
- 微分系数
- 微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能
- 微分的控制作用跟偏差的变化的速度有关,微分控制能够预测偏差,产生超前的校正作用,有助于减少超调
可以看出,某一个偏差的 PID 值只跟相邻的三个偏差相关。每一项前面都有系数,这些系数都是需要实验中去尝试然后确定的。 比例、微分、积分每个项前面都有一个系数,且离散化的公式,很适合编程实现
讲到这里,PID 的原理和方法就说完了,剩下的就是实践了。在真正的工程实践中,最难的是如果确定三个项的系数, 这就需要大量的实验以及经验来决定了。通过不断的尝试和正确的思考,就能选取合适的系数,实现优良的控制器
比例控制算法
比例控制
先说 PID 中最简单的比例控制,抛开其他两个不谈。还是用一个经典的例子吧。 假设有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在 1 米的高度。 假设初始时刻,水缸里的水位是 0.2 米,那么当前时刻的水位和目标水位之间是存在一个误差的 error, 且 error 为 0.8。这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位
如果单纯的用比例控制算法,就是指加入的水量 和误差 error 是成正比的。即
假设 取 0.5:
- 那么 时(表示第 1 次加水,也就是第一次对系统施加控制), 那么 ,所以这一次加入的水量会使水位在 0.2 的基础上上升 0.4, 达到 0.6
- 接着, 时刻(第 2 次施加控制),当前水位是 0.6,所以 error 是 0.4。 ,会使水位再次上升 0.2,达到 0.8。
如此这么循环下去,就是比例控制算法的运行方法。可以看到,最终水位会达到我们需要的 1 米
稳态误差
但是,单单的比例控制存在着一些不足,其中一点就是:稳态误差
上述的例子,根据 取值不同,系统最后都会达到 1 米,只不过 大了到达的快, 小了到达的慢一些,不会有稳态误差
但是,考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程, 都会漏掉 0.1 米高度的水。仍然假设 取 0.5, 那么会存在着某种情况,假设经过几次加水,水缸中的水位到 0.8 时,水位将不会再变换。 因为,水位为 0.8,则误差 . 所以每次往水缸中加水的量为 。 同时,每次加水,缸里又会流出去 0.1 米的水,加入的水和流出的水相抵消,水位将不再变化。 也就是说,目标是 1 米,但是最后系统达到 0.8 米的水位就不再变化了,且系统已经达到稳定。 由此产生的误差就是稳态误差了
在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动, 摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行, 各类阻力和消耗都可以理解为本例中的“漏水”。 所以,单独的比例控制,在很多时候并不能满足要求
积分控制算法
还是用上面的例子,如果仅仅用比例,可以发现存在稳态误差,最后的水位就卡在 0.8 了。 于是,在控制中,再引入一个分量,该分量和误差的积分是正比关系。 所以,比例 + 积分控制算法为:
还是用上面的例子来说明,第一次的误差 error 是 0.8,第二次的误差是 0.4,至此, 误差的积分(离散情况下积分其实就是做累加),。 这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数 乘以这个积分项
由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差。 假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的 0.8,由于加入了积分项的存在, 会让输入增大,从而使得水缸的水位可以大于 0.8,渐渐到达目标的 1.0。这就是积分项的作用
微分控制算法
换一个例子,考虑刹车情况。平稳的驾驶车辆,当发现前面有红灯时, 为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。 当车辆离停车线非常近的时候,则使劲踩刹车,使车辆停下来。 整个过程可以看做一个加入微分的控制策略
微分,说白了在离散情况下,就是 error 的差值,就是 时刻和 时刻 error 的差,即
可以看到,在刹车过程中,因为 error 是越来越小的,所以这个微分控制项一定是负数, 在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。 从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用, 就可以理解为刹车,当车离停车线很近并且车速还很快时, 这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来
切换到上面给水缸加水的例子,就是当发现水缸里的水快要接近 1 的时候,加入微分项, 可以防止给水缸里的水加到超过 1 米的高度,说白了就是减少控制过程中的震荡
PID Python 实例
# -*- coding: utf-8 -*-
# ***************************************************
# * File : pid.py
# * Author : Zhefeng Wang
# * Email : wangzhefengr@163.com
# * Date : 2023-06-07
# * Version : 0.1.060722
# * Description : description
# * Link : link
# * Requirement : 相关模块版本需求(例如: numpy >= 2.1.0)
# ***************************************************
# python libraries
import os
import sys
ROOT = os.getcwd()
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT))
import time
import matplotlib.pyplot as plt
import numpy as np
# from scipy.interpolate import spline
from scipy.interpolate import make_interp_spline
# global variable
LOGGING_LABEL = __file__.split('/')[-1][:-3]
class PID:
def __init__(self, P, I, D) -> None:
# PID 系数
self.Kp = P
self.Ki = I
self.Kd = D
# 时间变量
self.sample_time = 0.0 # TODO
self.current_time = time.time() # 当前时刻时间戳
self.last_time = self.current_time # 上次算法更新时刻时间戳
# 重置
self.clear()
def clear(self):
self.setpoint = 0.0 # 设定目标值
self.P_term = 0.0 # P
self.I_term = 0.0 # I
self.D_term = 0.0 # D
self.last_error = 0.0 # 上一时刻的误差
self.output = 0.0 # 输出
def update(self, feedback_value):
# 时间差
self.current_time = time.time() # 当前时间
delta_time = self.current_time - self.last_time
# 误差差分
error = self.setpoint - feedback_value # 当前时刻误差
delta_error = error - self.last_error
# PID
if delta_time >= self.sample_time:
# PID 各项计算
self.P_term = self.Kp * error # 比例项
self.I_term += error * delta_time # 积分项
self.D_term = delta_error / delta_time if delta_time > 0.0 else 0.0 # 微分项
# 更新 last_time
self.last_time = self.current_time
# 更新 last error
self.last_error = error
# 更新输出
self.output = self.P_term + (self.Ki * self.I_term) + (self.Kd * self.D_term)
def set_sample_time(self, sample_time):
self.sample_time = sample_time
@staticmethod
def visual(time_list, feedback_list, setpoint_list, END):
print(f"time_list: {time_list}")
print(f"setpoint_list: {setpoint_list}")
fig = plt.figure()
time_smooth = np.linspace(min(time_list), max(time_list), 300)
print(f"time_smooth: {time_smooth}")
feedback_smooth = make_interp_spline(time_list, feedback_list)(time_smooth)
print(f"feedback_smooth: {feedback_smooth}")
plt.plot(time_list, setpoint_list, 'r') # 绘制设定目标曲线
plt.plot(time_smooth, feedback_smooth, 'b-') # 设定
plt.xlim((0, END))
plt.ylim((min(feedback_list) - 0.5, max(feedback_list) + 0.5))
plt.xlabel('time (s)')
plt.ylabel('PID (PV)')
plt.title('PID test', fontsize = 15)
plt.grid(True)
plt.show()
def test_pid(P, I , D, END):
# 实例化 PID 类
pid = PID(P, I, D)
# 设置参数
pid.setpoint = 1.1 # 设置目标值
pid.set_sample_time(sample_time = 0.01) # 设置采样间隔时间
time_list = list(range(1, END))
feedback = 0.5 # 设置初始反馈值
feedback_list = [] # 反馈值
setpoint_list = [] # 设定值
for i in time_list:
# PID 更新
pid.update(feedback_value = feedback)
feedback += pid.output # 更新反馈值
time.sleep(0.01)
feedback_list.append(feedback)
setpoint_list.append(pid.setpoint)
# 画图
pid.visual(time_list, feedback_list, setpoint_list, END)
# 测试代码 main 函数
def main():
test_pid(P = 1.2, I = 1, D = 0.001, END = 20)
if __name__ == "__main__":
main()
PID 调试的一些经验
PID 调试的一般原则:
- 在输出不震荡时,增大比例增益
- 在输出不震荡时,减少积分时间常数
- 在输出不震荡时,增大微分时间常数
PID 调节口诀:
- 参数整定找最佳,从小到大顺序查
- 先是比例后积分,最后再把微分加
- 曲线振荡很频繁,比例度盘要放大
- 曲线漂浮绕大湾,比例度盘往小扳
- 曲线偏离回复慢,积分时间往下降
- 曲线波动周期长,积分时间再加长
- 曲线振荡频率快,先把微分降下来
- 动差大来波动慢,微分时间应加长
- 理想曲线两个波,前高后低四比一
- 一看二调多分析,调节质量不会低