图与网络在生活中很常见,然而,图与网络的建模问题的求解方法确不太一样, 多使用启发式算法,尽管在某些情形下也能转换成数学规划建模形式, 但面对大规模问题往往效率会比较低。
图的基本概念
图(Graph)是图论的研究对象,图论是欧拉在研究哥尼斯堡七桥问题过程中,创造出来的新数学分支。
顶点和边
图/网络(Graph / Network)视为一个系统。图是一种非线性数据结构,
由顶点(vertex)和边(edge)组成。可以将图以 $G(V, E)$ 表示,
表示一组顶点 $V$ 和一组边 $E$的集合。
- 顶点/节点(Vertex/Node),以
$V$表示,表示顶点的集合 - 边/链接(Edge/Link),以
$E$表示,表示边的集合
以下展示了一个包含 5 个顶点和 7 条边的图:
$$V = \{1, 2, 3, 4, 5\}$$
$$E = \{(1,2), (1,3), (1,5), (2,3), (2,4), (2,5), (4,5)\}$$
$$G = \{V, E\}$$
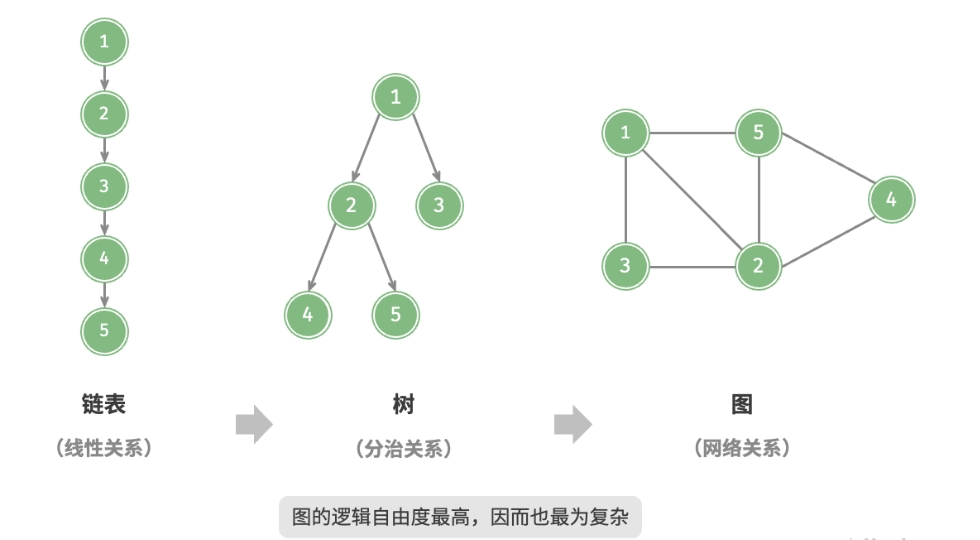
如果将顶点看作节点,将边看作连接各个节点的引用(指针),就可以将图看作一种从链表拓展而来的数据结构。 相较于线性关系(链表)和分治关系(树),网络关系(图)的自由度更高,因而更为复杂。
顶点和边具有属性(Attribute),边可能有方向(有向图 Directed Graph)。 比如:社交网络中,人是顶点,人和人之间的关系是边,人(顶点)的属性比如年龄、性别、职业、 爱好等构成了一个向量,类似的,边也可用向量来表示。
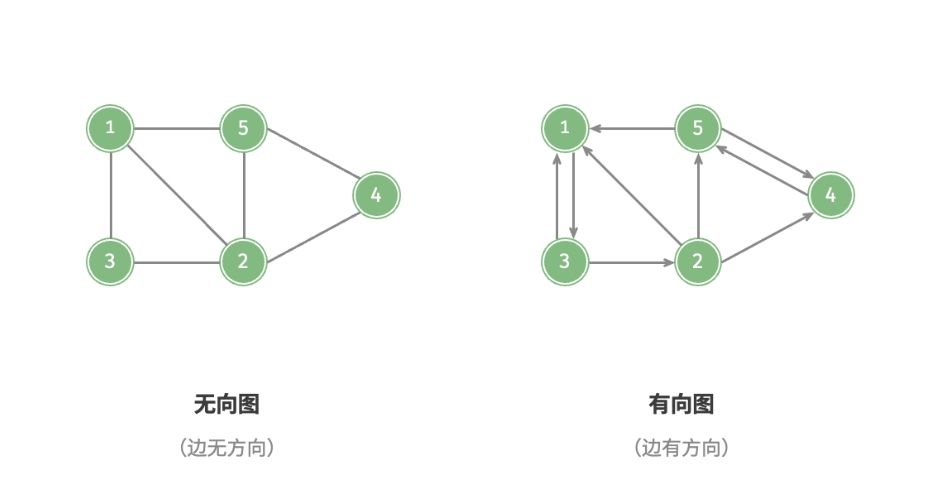
无向图和有向图
根据边是否具有方向,可分为无向图(undirected graph)和有向图(directed graph),如下图所示。
- 在无向图中,边表示两顶点之间的“双向”连接关系,例如微信或 QQ 中的“好友关系”。
- 在有向图中,边具有方向性,即
$A \rightarrow B$和$A \leftarrow B$两个方向的边是相互独立的, 例如微博或抖音上的 “关注” 与 “被关注” 关系。
连通图和非连通图
根据所有顶点是否连通,可分为连通图(connected graph)和非连通图(disconnected graph),如下图所示。
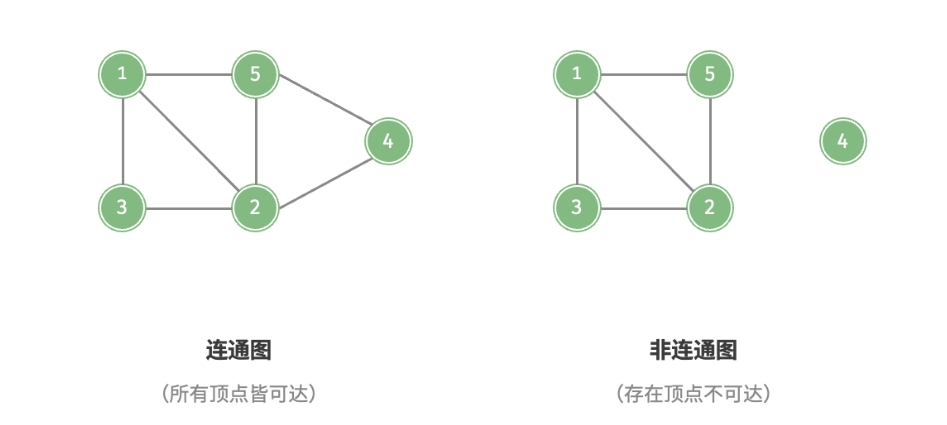
- 连通图:若图中任意两个顶点之间至少有一条路径连接起来,即从某个顶点出发,可以到达其余任意顶点。
- 非连通图:从某个顶点出发,至少有一个顶点无法到达。
- 连通分量:在无向图中极大连通子图称为连通分量,注意连通分量的概念:
- 首先,它是子图;
- 其次,子图是连通的,连通子图具有极大顶点数;
- 最后,具有极大顶点数的连通子图包含依附于这些顶点的所有边。
- 强连通分量:在有向图中,如果对于每一对
$v_{i}$和$v_{j}$,$v_{i} \neq v_{j}$, 无论从$v_{i}$到$v_{j}$还是从$v_{j}$到$v_{i}$都存在路径,则称为强连通图。 有向图中的极大强连通子图称为有向图的强连通分量。
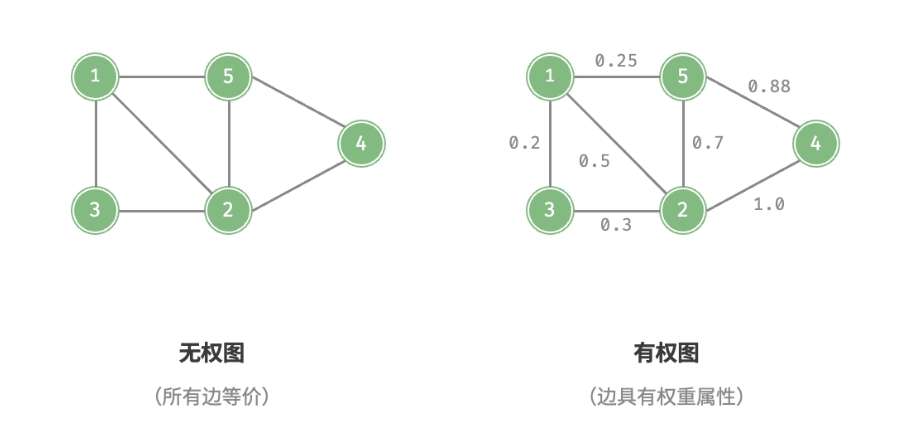
无权图和有权图
还可以为边添加“权重”变量,从而得到如下图所示的有权图(weighted graph)。 例如在《王者荣耀》等手游中,系统会根据共同游戏时间来计算玩家之间的“亲密度”, 这种亲密度网络就可以用有权图来表示。
- 对于有向图通常称有方向的边为弧(arc),用尖括号表示弧的方向,
如
<A, B>表示弧的方向是$A \rightarrow B$; - 有向图的边或弧具有与它相关数字,这种与图的边或弧相关的数字叫作权重, 在实际问题中,权通常是两个城市之间的距离、两个地点之间的运输费用等。
图的其他概念
图数据结构包含以下常用术语:
- 邻接(adjacency):当两顶点之间存在边相连时,称这两顶点“邻接”。 在上图中,顶点 1 的邻接顶点为顶点 2、3、5。
- 路径(path):从顶点 A 到顶点 B 经过的边构成的序列被称为从 A 到 B 的“路径”。 在上图中,边序列 1-5-2-4 是顶点 1 到顶点 4 的一条路径。
- 度(degree):一个顶点拥有的边数。对于有向图, 入度(in-degree)表示有多少条边指向该顶点, 出度(out-degree)表示有多少条边从该顶点指出。
图的表示方法
图本身也具有表达其自身的全局属性,来描述整个图。
邻接矩阵
对于图的存储和表示,最常见的方法是邻接矩阵(Adjacency Matrix)。
注意:对于有向图,
$\text{arch}[i, j] \neq \text{arch}[j, i]$, 而无向图则是$\text{arch}[i, j] = \text{arch}[j, i]$。在有向图中, 通常用$1$表示$<v_{i}, v_{j}>$连通,用$0$表示$<v_{i}, v_{j}>$不连通。 在实际问题中,还可以用$\text{arch}[i, j]$表示城市之间的距离,运输的费用等。
设图 $G$ 的顶点数量为 $n$,邻接矩阵(adjacency matrix)使用一个 $n \times n$ 大小的矩阵来表示图,
每一行(列)代表一个顶点,矩阵元素代表边,用 $1$ 或 $0$ 表示两个顶点之间是否存在边。
如下图所示,设邻接矩阵为 $M$、顶点列表为 $V$ ,
那么矩阵元素 $M[i, j] = 1$ 表示顶点 $V[i]$ 到顶点 $V[j]$ 之间存在边,
反之 $M[i, j] = 0$ 表示两顶点之间无边。
$$\text{M}[i,j]=\begin{cases} 1, \text{if} \space (V_{i}, V_{j}) \in E \\ 0, \text{otherwise} \end{cases}$$
邻接矩阵具有以下特性。
- 顶点不能与自身相连,因此邻接矩阵主对角线元素没有意义。
- 对于无向图,两个方向的边等价,此时邻接矩阵关于主对角线对称。
- 将邻接矩阵的元素从 1 和 0 替换为权重,则可表示有权图。
使用邻接矩阵表示图时,我们可以直接访问矩阵元素以获取边,
因此增删查改操作的效率很高,时间复杂度均为 $O(1)$ 。
然而,矩阵的空间复杂度为 $O(n^{2})$,内存占用较多。
旅行商问题(Traveling Saleman Problem, TSP):
以 TSP 问题讲解邻接矩阵在图分析中的应用。TSP 问题假设有一个旅行商人要拜访
$n$个城市, 他必须选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。问题:设有 20 个城市,要使任意两个城市之间能够直接通达,需要规划一条路线,使每个城市都能访问一次,
显然,这是一个无向图问题,设邻接矩阵
$\text{cost}[i,j]$表示城市$i$和 城市$j$之间的距离, 基于整数规划的思想,用 0-1 变量$X[i,j]$表示从城市$i$出发访问城市$j$。 所以,在 TSP 问题中有两个邻接矩阵;$\text{cost}[i,j]$表示距离;$X[i,j]$表示路径。 TSP 问题可以建模成一个 0-1 整数规划问题,其具体如下:$$\text{min}\space \sum_{i=1}^{I}\sum_{j=1}^{J}\text{cost}[i,j]\times X[i,j]$$$$\text{s.t.}\space\begin{cases} \sum_{i=1}^{I}X[i,j]=1, j=1,2,\cdots, J \\ \sum_{j=1}^{J}X[i,j]=1, i=1,2,\cdots, I \end{cases}$$
邻接列表
也可以选用边来表示图,即邻接列表(Adjacency List),这可以大幅减少对空间的消耗, 因为实际的边比所有可能的边(邻接矩阵)数量往往小很多。
邻接表(adjacency list)使用 $n$ 个链表来表示图,链表节点表示顶点。
第 $i$ 个链表对应顶点 $i$,其中存储了该顶点的所有邻接顶点(与该顶点相连的顶点)。
下图展示了一个使用邻接表存储的图的示例。
邻接表仅存储实际存在的边,而边的总数通常远小于 $n^{2}$ ,因此它更加节省空间。
然而,在邻接表中需要通过遍历链表来查找边,因此其时间效率不如邻接矩阵。
观察上图,邻接表结构与哈希表中的 “链式地址” 非常相似,因此我们也可以采用类似的方法来优化效率。
比如当链表较长时,可以将链表转化为 AVL 树或红黑树,从而将时间效率从 $O(n)$ 优化至
$O(\log n)$ ;还可以把链表转换为哈希表,从而将时间复杂度降至 $O(1)$。
图的常见应用
许多现实系统可以用图来建模,相应的问题也可以约化为图计算问题。
| 顶点 | 边 | 图计算问题 | |
|---|---|---|---|
| 社交网络 | 用户 | 好友关系 | 潜在好友推荐 |
| 地铁线路 | 站点 | 站点间的连通性 | 最短路线推荐 |
| 太阳系 | 星体 | 星体间的万有引力作用 | 行星轨道计算 |
图的基础操作
图的基本操作可分为对 “边” 的操作和对 “顶点” 的操作。 在 “邻接矩阵” 和 “邻接表” 两种表示方法下,实现方式有所不同。
基于邻接矩阵的实现
给定一个顶点数量为 $n$ 的无向图,则各种操作的实现方式如下图所示。
- 添加或删除边:直接在邻接矩阵中修改指定的边即可,使用
$O(1)$时间。 而由于是无向图,因此需要同时更新两个方向的边。 - 添加顶点:在邻接矩阵的尾部添加一行一列,并全部填
$0$即可,使用$O(n)$时间。 - 删除顶点:在邻接矩阵中删除一行一列。当删除首行首列时达到最差情况,
需要将
$(n-1)^{2}$个元素“向左上移动”,从而使用$O(n^{2})$时间。 - 初始化:传入
$n$个顶点,初始化长度为$n$的顶点列表 vertices , 使用$O(n)$时间;初始化$n \times n$大小的邻接矩阵 adjMat , 使用$O(n^{2})$时间。
初始化邻接矩阵:
添加边:
删除边:
添加顶点:
删除顶点:
以下是基于邻接矩阵表示图的实现代码:
# graph_adjacency_matrix.py
class GraphAdjMat:
"""
基于邻接矩阵实现的无向图类
"""
def __init__(self, vertices: list[int], edges: list[list[int]]):
"""
构造方法
"""
# 顶点列表,元素代表“顶点值”,索引代表“顶点索引”
self.vertices: list[int] = []
# 邻接矩阵,行列索引对应“顶点索引”
self.adj_mat: list[list[int]] = []
# 添加顶点
for val in vertices:
self.add_vertex(val)
# 添加边
# 请注意,edges 元素代表顶点索引,即对应 vertices 元素索引
for e in edges:
self.add_edge(e[0], e[1])
def size(self) -> int:
"""
获取顶点数量
"""
return len(self.vertices)
def add_vertex(self, val: int):
"""
添加顶点
"""
n = self.size()
# 向顶点列表中添加新顶点的值
self.vertices.append(val)
# 在邻接矩阵中添加一行
new_row = [0] * n
self.adj_mat.append(new_row)
# 在邻接矩阵中添加一列
for row in self.adj_mat:
row.append(0)
def remove_vertex(self, index: int):
"""
删除顶点
"""
if index >= self.size():
raise IndexError()
# 在顶点列表中移除索引 index 的顶点
self.vertices.pop(index)
# 在邻接矩阵中删除索引 index 的行
self.adj_mat.pop(index)
# 在邻接矩阵中删除索引 index 的列
for row in self.adj_mat:
row.pop(index)
def add_edge(self, i: int, j: int):
"""
添加边
"""
# 参数 i, j 对应 vertices 元素索引
# 索引越界与相等处理
if i < 0 or j < 0 or i >= self.size() or j >= self.size() or i == j:
raise IndexError()
# 在无向图中,邻接矩阵关于主对角线对称,即满足 (i, j) == (j, i)
self.adj_mat[i][j] = 1
self.adj_mat[j][i] = 1
def remove_edge(self, i: int, j: int):
"""
删除边
"""
# 参数 i, j 对应 vertices 元素索引
# 索引越界与相等处理
if i < 0 or j < 0 or i >= self.size() or j >= self.size() or i == j:
raise IndexError()
self.adj_mat[i][j] = 0
self.adj_mat[j][i] = 0
def print(self):
"""
打印邻接矩阵
"""
print("顶点列表 =", self.vertices)
print("邻接矩阵 =")
print_matrix(self.adj_mat)
基于邻接列表的实现
设无向图的顶点总数为 $n$、边总数为 $m$ ,则可根据下图所示的方法实现各种操作。
- 添加边:在顶点对应链表的末尾添加边即可,使用
$O(1)$时间。 因为是无向图,所以需要同时添加两个方向的边。 - 删除边:在顶点对应链表中查找并删除指定边,使用
$O(m)$时间。 在无向图中,需要同时删除两个方向的边。 - 添加顶点:在邻接表中添加一个链表,并将新增顶点作为链表头节点,使用
$O(1)$时间。 - 删除顶点:需遍历整个邻接表,删除包含指定顶点的所有边,使用
$O(n+m)$时间。 - 初始化:在邻接表中创建
$n$个顶点和$2m$条边,使用$O(n+m)$时间。
初始化邻接表:
添加边:
删除边:
添加顶点:
删除顶点:
以下是邻接表的代码实现。对比上图,实际代码有以下不同。
- 为了方便添加与删除顶点,以及简化代码,我们使用列表(动态数组)来代替链表。
- 使用哈希表来存储邻接表,
key为顶点实例,value为该顶点的邻接顶点列表(链表)。
另外,我们在邻接表中使用 Vertex 类来表示顶点,这样做的原因是:
如果与邻接矩阵一样,用列表索引来区分不同顶点,那么假设要删除索引为 $i$ 的顶点,
则需遍历整个邻接表,将所有大于 $i$ 的索引全部减 $1$,效率很低。
而如果每个顶点都是唯一的 Vertex 实例,删除某一顶点之后就无须改动其他顶点了。
# graph_adjacency_list.py
class GraphAdjList:
"""
基于邻接表实现的无向图类
"""
def __init__(self, edges: list[list[Vertex]]):
"""
构造方法
"""
# 邻接表,key:顶点,value:该顶点的所有邻接顶点
self.adj_list = dict[Vertex, list[Vertex]]()
# 添加所有顶点和边
for edge in edges:
self.add_vertex(edge[0])
self.add_vertex(edge[1])
self.add_edge(edge[0], edge[1])
def size(self) -> int:
"""
获取顶点数量
"""
return len(self.adj_list)
def add_edge(self, vet1: Vertex, vet2: Vertex):
"""
添加边
"""
if vet1 not in self.adj_list or vet2 not in self.adj_list or vet1 == vet2:
raise ValueError()
# 添加边 vet1 - vet2
self.adj_list[vet1].append(vet2)
self.adj_list[vet2].append(vet1)
def remove_edge(self, vet1: Vertex, vet2: Vertex):
"""
删除边
"""
if vet1 not in self.adj_list or vet2 not in self.adj_list or vet1 == vet2:
raise ValueError()
# 删除边 vet1 - vet2
self.adj_list[vet1].remove(vet2)
self.adj_list[vet2].remove(vet1)
def add_vertex(self, vet: Vertex):
"""
添加顶点
"""
if vet in self.adj_list:
return
# 在邻接表中添加一个新链表
self.adj_list[vet] = []
def remove_vertex(self, vet: Vertex):
"""
删除顶点
"""
if vet not in self.adj_list:
raise ValueError()
# 在邻接表中删除顶点 vet 对应的链表
self.adj_list.pop(vet)
# 遍历其他顶点的链表,删除所有包含 vet 的边
for vertex in self.adj_list:
if vet in self.adj_list[vertex]:
self.adj_list[vertex].remove(vet)
def print(self):
"""
打印邻接表
"""
print("邻接表 =")
for vertex in self.adj_list:
tmp = [v.val for v in self.adj_list[vertex]]
print(f"{vertex.val}: {tmp},")
效率对比
设图中共有 $n$ 个顶点和 $m$ 条边,下表对比了邻接矩阵和邻接表的时间效率和空间效率。
| 邻接矩阵 | 邻接表(链表) | 邻接表(哈希表) | |
|---|---|---|---|
| 判断是否邻接 | $O(1)$ |
$O(m)$ |
$O(1)$ |
| 添加边 | $O(1)$ |
$O(1)$ |
$O(1)$ |
| 删除边 | $O(1)$ |
$O(m)$ |
$O(1)$ |
| 添加顶点 | $O(n)$ |
$O(1)$ |
$O(1)$ |
| 删除顶点 | $O(n^{2})$ |
$O(n+m)$ |
$O(n)$ |
| 内存空间占用 | $O(n^{2})$ |
$O(n+m)$ |
$O(n+m)$ |
观察上表,似乎邻接表(哈希表)的时间效率与空间效率最优。 但实际上,在邻接矩阵中操作边的效率更高,只需一次数组访问或赋值操作即可。 综合来看,邻接矩阵体现了“以空间换时间”的原则,而邻接表体现了“以时间换空间”的原则。
图的遍历
树代表的是 “一对多” 的关系,而图则具有更高的自由度,可以表示任意的 “多对多” 关系。 因此,可以把树看作图的一种特例。显然,树的遍历操作也是图的遍历操作的一种特例。
图和树都需要应用 搜索算法 来实现遍历操作。图的遍历方式也可分为两种: 广度优先遍历和深度优先遍历。
广度优先遍历
Breadth-First Search, BFS
算法介绍
广度优先遍历是一种由近及远的遍历方式,从某个节点出发, 始终优先访问距离最近的顶点,并一层层向外扩张。如下图所示,
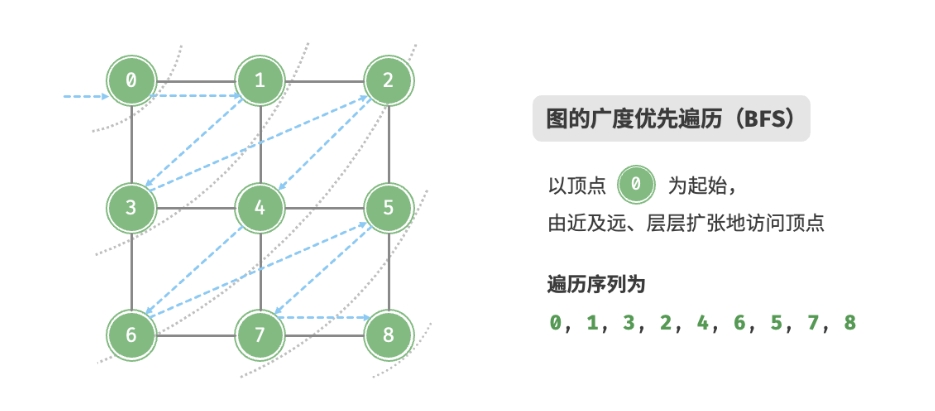
- 从左上角顶点出发,首先遍历该顶点的所有邻接顶点;
- 然后遍历下一个顶点的所有邻接顶点;
- 以此类推,直至所有顶点访问完毕。
算法实现
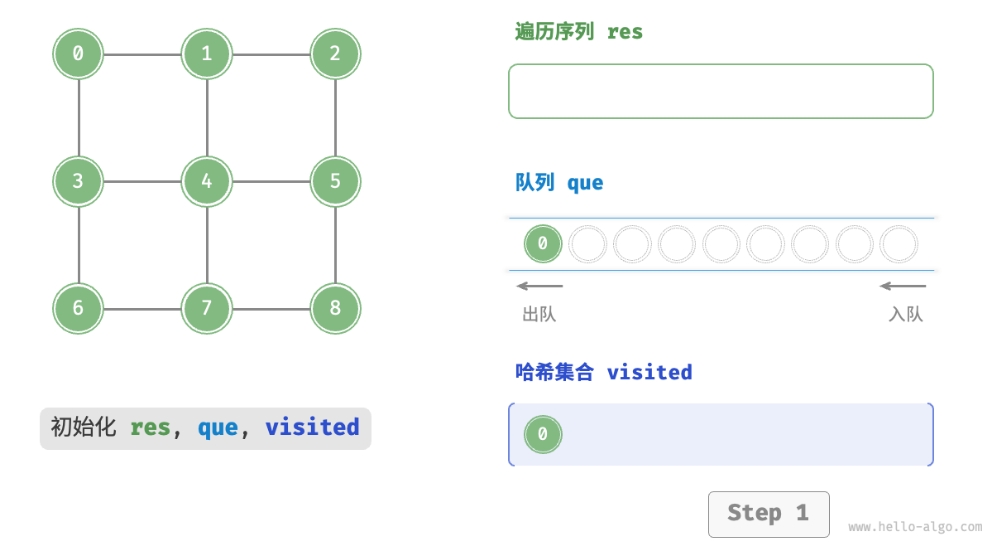
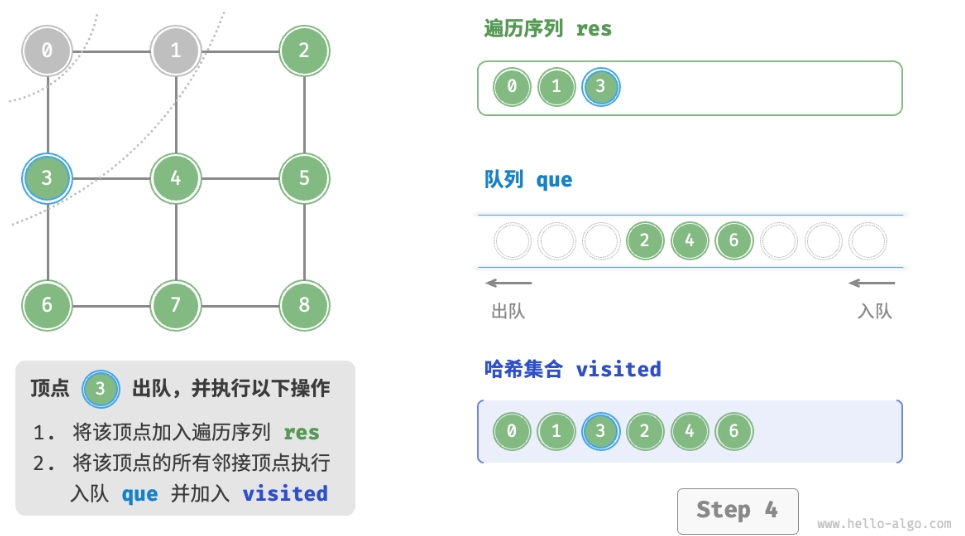
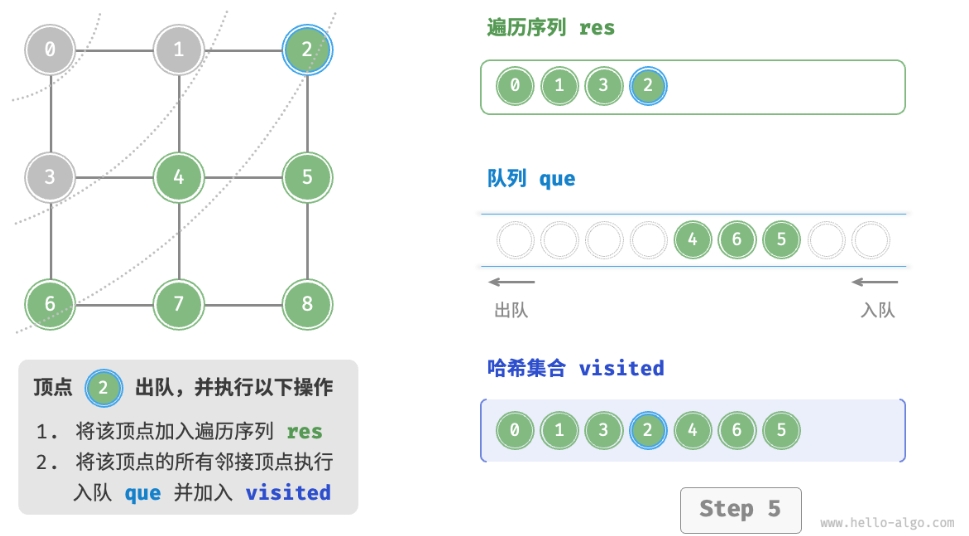
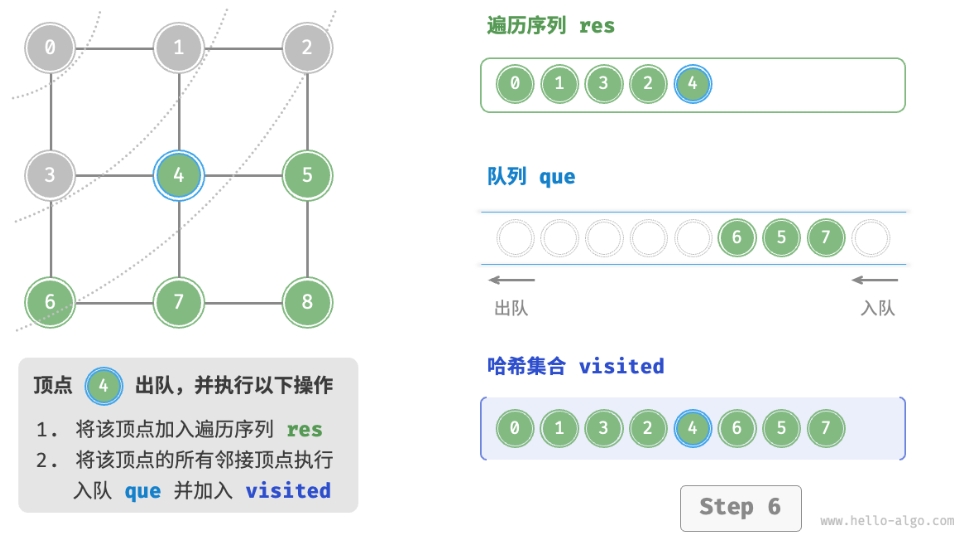
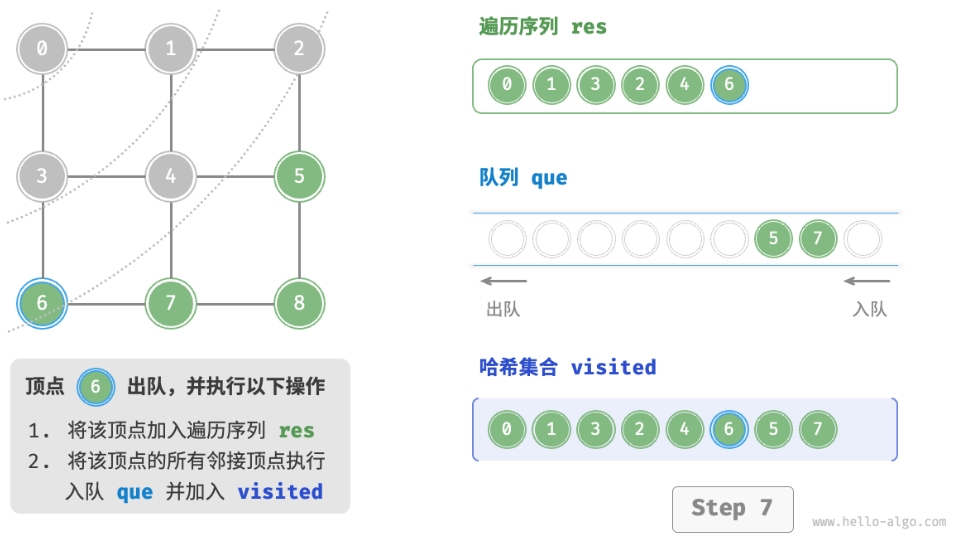
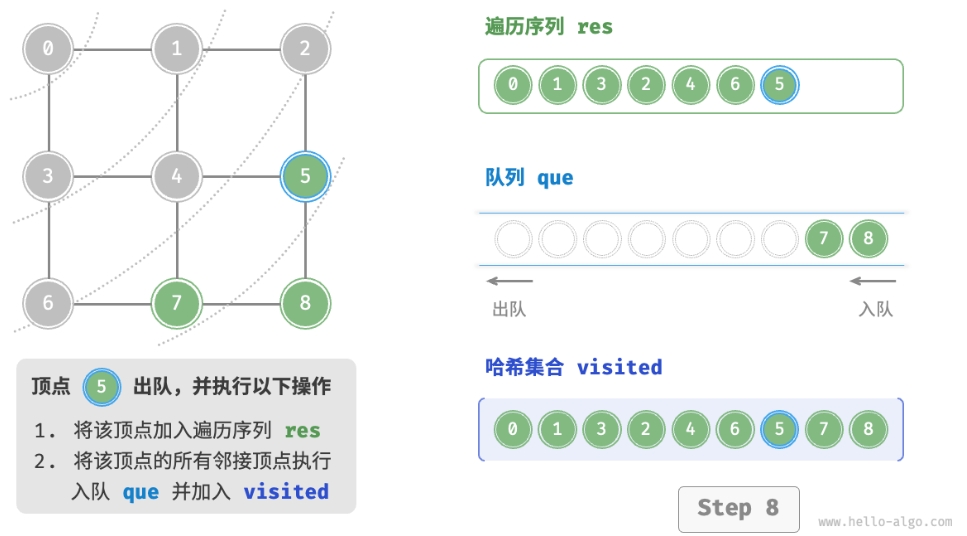
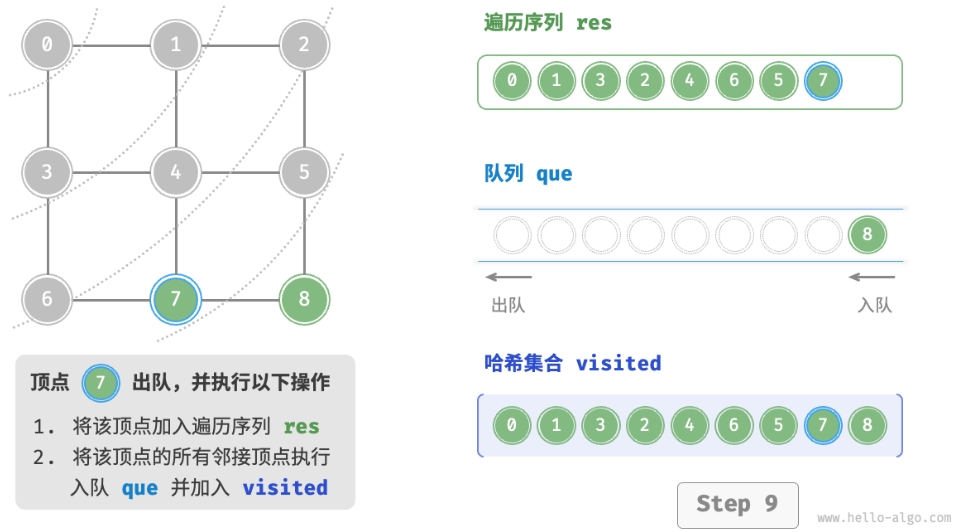
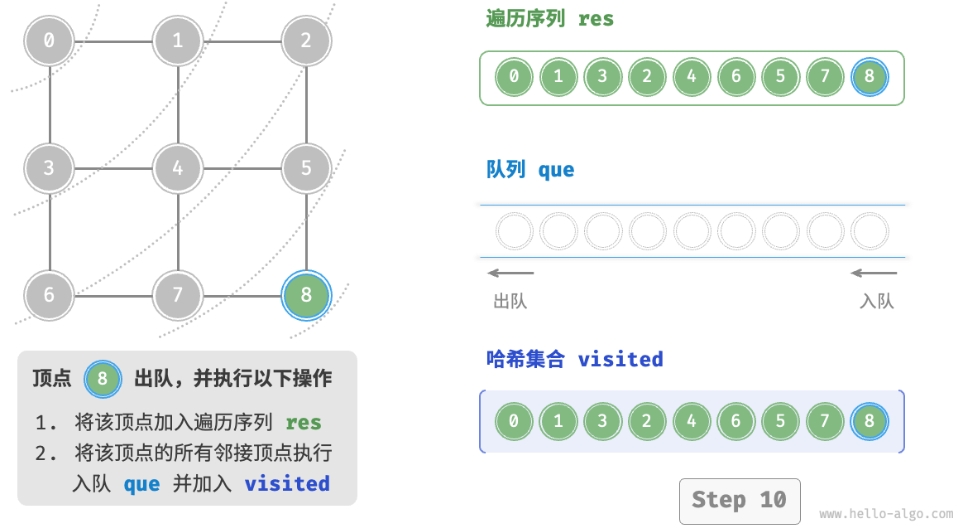
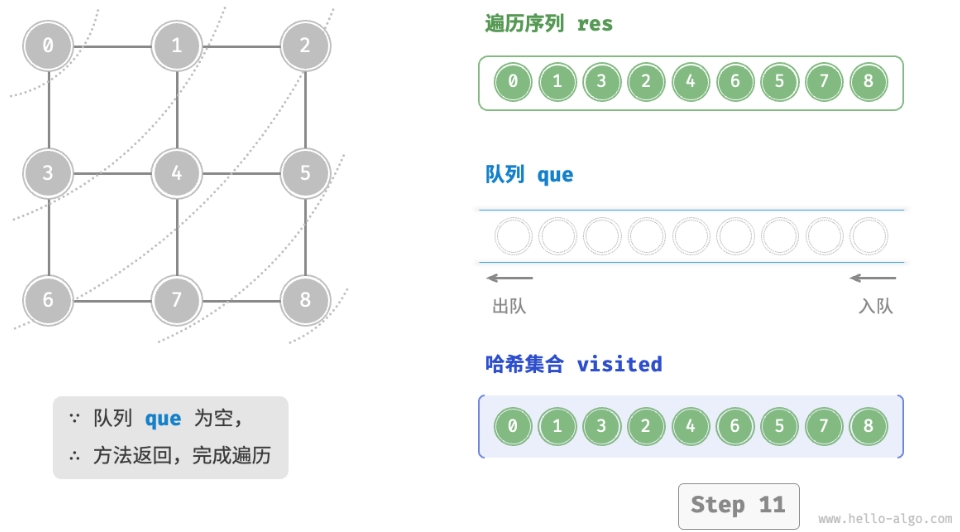
BFS 通常借助队列来实现,代码如下所示。队列具有“先入先出”的性质, 这与 BFS 的“由近及远”的思想异曲同工。
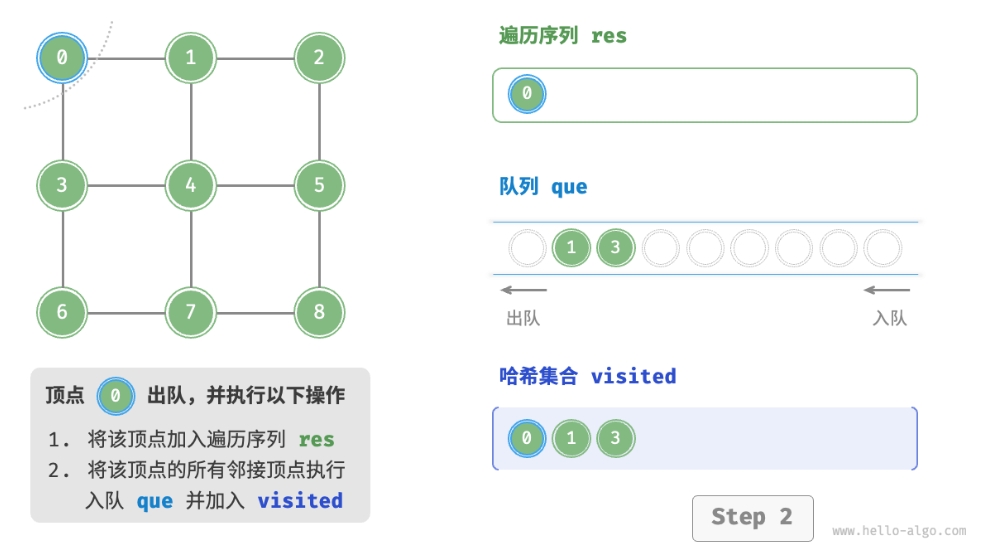
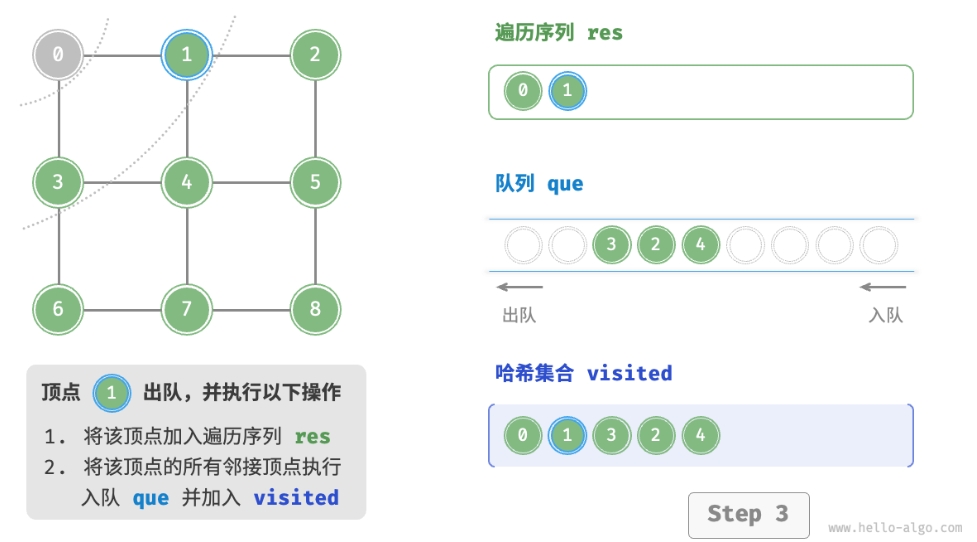
- 将遍历起始顶点
startVet加入队列,并开启循环。 - 在循环的每轮迭代中,弹出队首顶点并记录访问,然后将该顶点的所有邻接顶点加入到队列尾部。
- 循环步骤
2.,直到所有顶点被访问完毕后结束。
为了防止重复遍历顶点,我们需要借助一个哈希集合 visited 来记录哪些节点已被访问。
哈希集合可以看作一个只存储 key 而不存储 value 的哈希表, 它可以在
$O(1)$时间复杂度下进行 key 的增删查改操作。 根据 key 的唯一性,哈希集合通常用于数据去重等场景。
# graph_bfs.py
def graph_bfs(graph: GraphAdjList, start_vet: Vertex) -> list[Vertex]:
"""
广度优先遍历
"""
# 使用邻接表来表示图,以便获取指定顶点的所有邻接顶点
# 顶点遍历序列
res = []
# 哈希集合,用于记录已被访问过的顶点
visited = set[Vertex]([start_vet])
# 队列用于实现 BFS
que = deque[Vertex]([start_vet])
# 以顶点 vet 为起点,循环直至访问完所有顶点
while len(que) > 0:
vet = que.popleft() # 队首顶点出队
res.append(vet) # 记录访问顶点
# 遍历该顶点的所有邻接顶点
for adj_vet in graph.adj_list[vet]:
if adj_vet in visited:
continue # 跳过已被访问的顶点
que.append(adj_vet) # 只入队未访问的顶点
visited.add(adj_vet) # 标记该顶点已被访问
# 返回顶点遍历序列
return res
复杂度分析
- 时间复杂度:
- 所有顶点都会入队并出队一次,使用
$O(|V|)$时间; - 在遍历邻接顶点的过程中,由于是无向图,因此所有边都会被访问 2 次,使用
$O(2|E|)$时间; - 总体使用
$O(|V|+|E|)$时间。
- 所有顶点都会入队并出队一次,使用
- 空间复杂度:列表
res,哈希集合visited,队列que中的顶点数量最多为$|V|$, 使用$O(|V|)$空间。
广度优先遍历的序列是否唯一?
不唯一。广度优先遍历只要求按“由近及远”的顺序遍历, 而多个相同距离的顶点的遍历顺序允许被任意打乱。 以上图为例,顶点 1、3 的访问顺序可以交换, 顶点 2、4、6 的访问顺序也可以任意交换。
深度优先遍历
Depth-First Search, DFS
算法介绍
深度优先遍历是一种优先走到底、无路可走再回头的遍历方式。如下图所示:
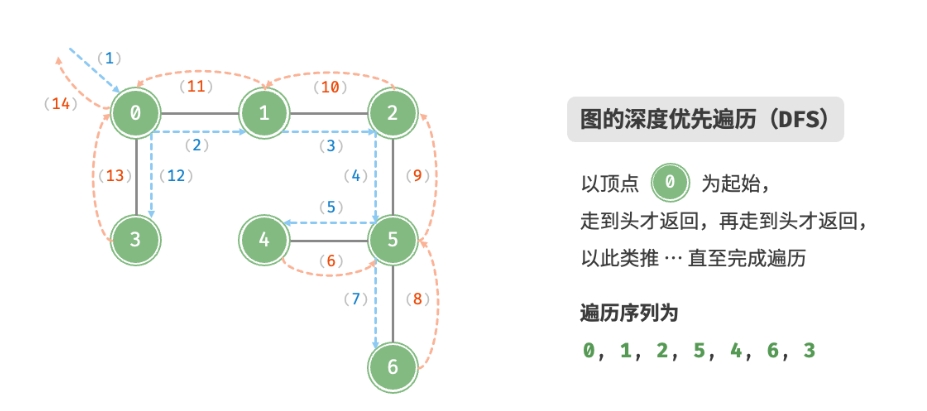
- 从左上角顶点出发,访问当前顶点的某个邻接顶点,直到走到尽头时返回;
- 再继续走到尽头并返回;
- 以此类推,直至所有顶点遍历完成。
算法实现
这种“走到尽头再返回”的算法范式通常基于递归来实现。与广度优先遍历类似,
在深度优先遍历中,也需要借助一个哈希集合 visited 来记录已被访问的顶点,
以避免重复访问顶点。
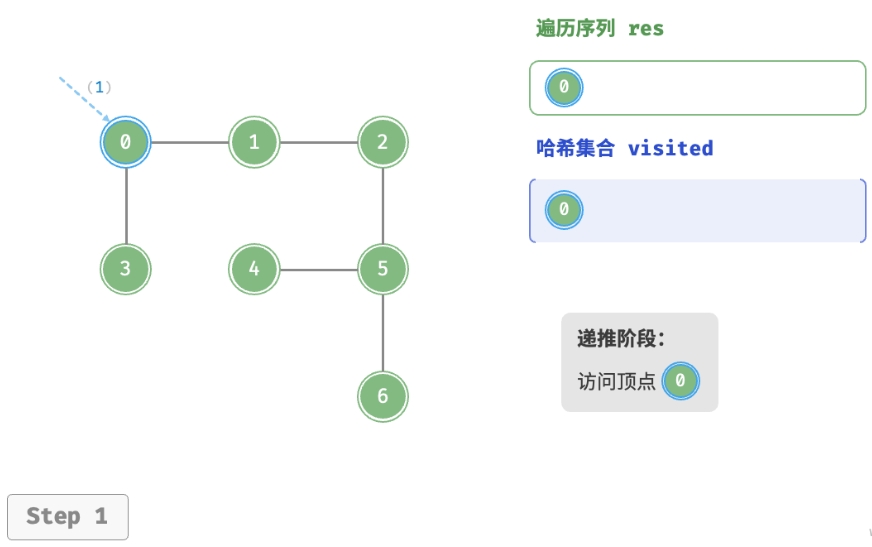
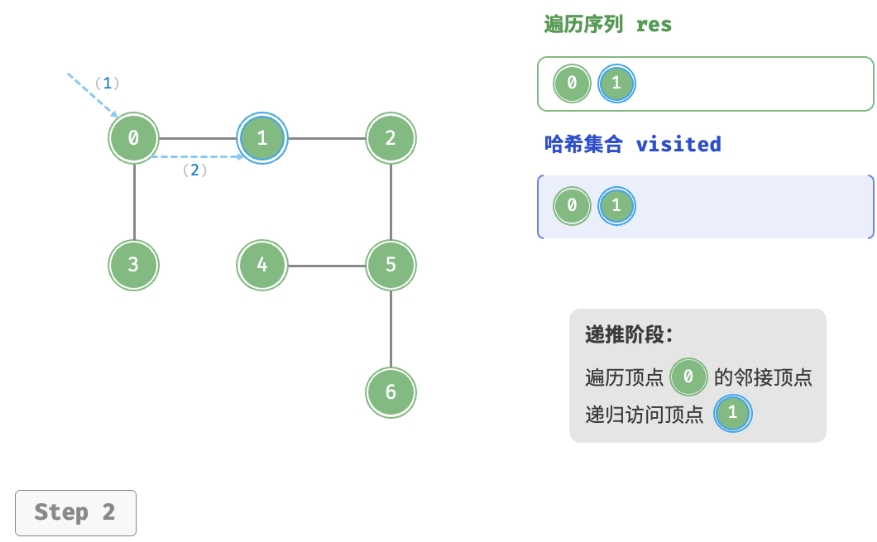
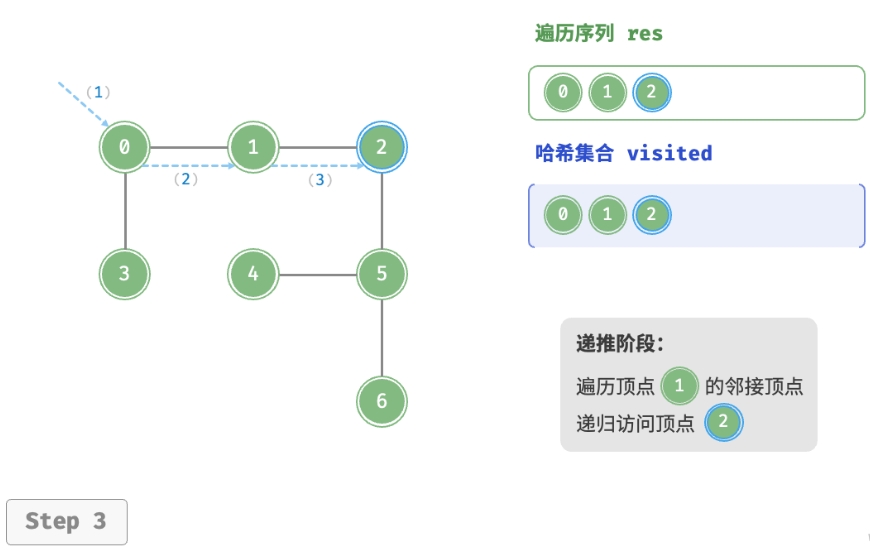
# graph_dfs.py
def dfs(graph: GraphAdjList, visited: set[Vertex], res: list[Vertex], vet: Vertex):
"""
深度优先遍历辅助函数
"""
res.append(vet) # 记录访问顶点
visited.add(vet) # 标记该顶点已被访问
# 遍历该顶点的所有邻接顶点
for adjVet in graph.adj_list[vet]:
if adjVet in visited:
continue # 跳过已被访问的顶点
# 递归访问邻接顶点
dfs(graph, visited, res, adjVet)
def graph_dfs(graph: GraphAdjList, start_vet: Vertex) -> list[Vertex]:
"""
深度优先遍历
"""
# 使用邻接表来表示图,以便获取指定顶点的所有邻接顶点
# 顶点遍历序列
res = []
# 哈希集合,用于记录已被访问过的顶点
visited = set[Vertex]()
dfs(graph, visited, res, start_vet)
return res
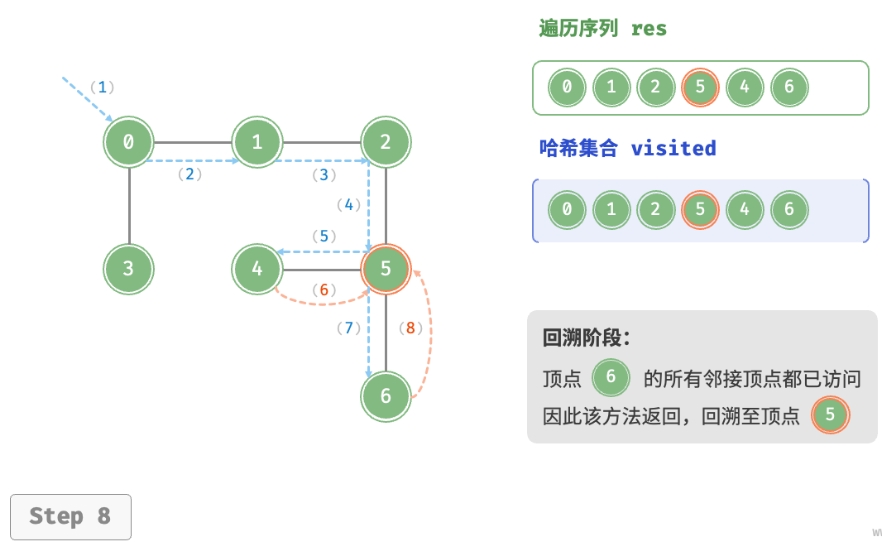
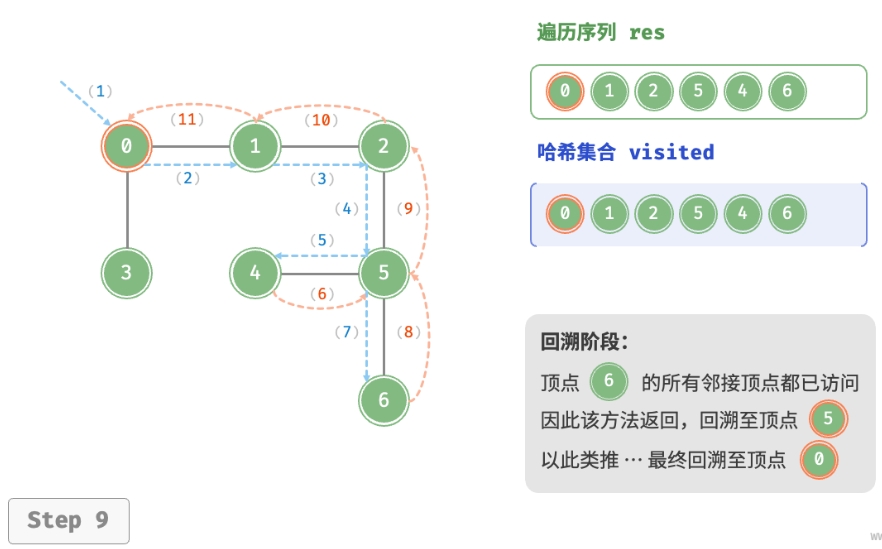
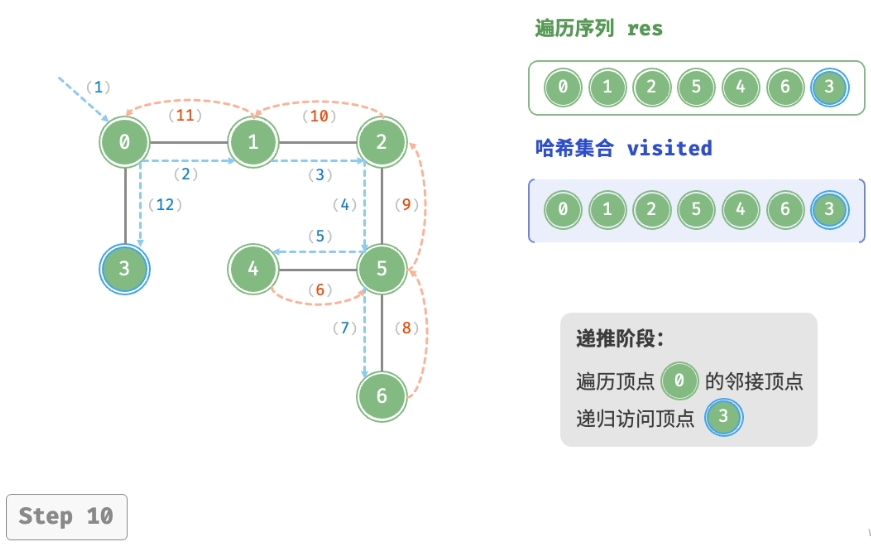
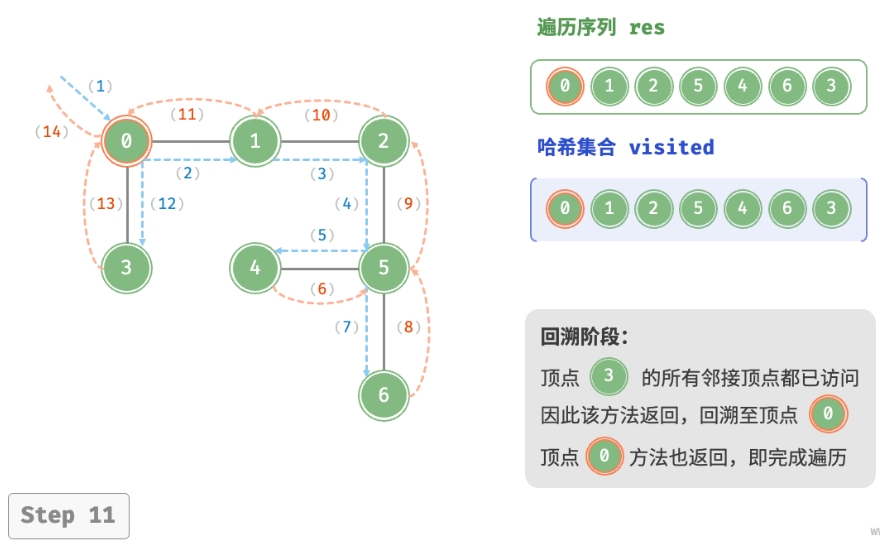
深度优先遍历的算法流程如下图所示。
- 直虚线代表向下递推,表示开启了一个新的递归方法来访问新顶点。
- 曲虚线代表向上回溯,表示此递归方法已经返回,回溯到了开启此方法的位置。
为了加深理解,建议将下图与代码结合起来,在脑中模拟(或者用笔画下来)整个 DFS 过程, 包括每个递归方法何时开启、何时返回。
深度优先遍历的序列是否唯一?
与广度优先遍历类似,深度优先遍历序列的顺序也不是唯一的。 给定某顶点,先往哪个方向探索都可以,即邻接顶点的顺序可以任意打乱, 都是深度优先遍历。
以树的遍历为例,“根
$\rightarrow$左$\rightarrow$右” “左$\rightarrow$根$\rightarrow$右” “左$\rightarrow$右$\rightarrow$根”分别对应前序、中序、后序遍历, 它们展示了三种遍历优先级,然而这三者都属于深度优先遍历。
复杂度分析
- 时间复杂度:
- 所有顶点都会被访问 1 次,使用
$O(|V|)$时间; - 所有边都会被访问 2 次,使用
$O(2|E|)$时间; - 总体使用
$O(|V| + |E|)$时间。
- 所有顶点都会被访问 1 次,使用
- 空间复杂度:列表
res,哈希集合visited顶点数量最多为$|V|$, 递归深度最大为$|V|$,因此使用$O(|V|)$空间。
图问题
最小生成树
最小生成树简介
在计算机中,树是一个很重要的数据结构。生活中的很多组织关系就是以树的形式体现的,如家族图谱、 省市县三级行政划分、企业组织架构、图书分类,基于树的数据结构有极高的计算效率, 因此很多图问题会转变成树的形式来求解。
在图网络中,一个无圈且连通的无向图称为树。 需要注意的是,树先是无圈的,其次是连通的。最小生成树也称最小部分树, 对于一个无向图,不同的切割方法可以得到不同的树,树边的权值总和也不相同。 权值总和是衡量切割优劣的一个指标,在大部分问题中, 图经过切割后生成的树,其边权值总和最小的数称为最小生成树。
在数学建模中,如果用图的数据结构求解比较麻烦,而用树的数据结构求解比较简单时, 就会用到最小生成树,将图转换成树来建模。在实际问题中, 一个经典的案例就是村庄架设电话线问题(类似于旅行商问题,不同的是, 旅行商最短路径问题中每个节点只能访问一次,而在村庄电话线问题中,有些节点是可以被访问多次的)。
最小生成树算法
求解最小生成树的算法有很多,其中的一个经典算法是 Kruskal(克鲁斯卡尔)算法, 其原理非常直观朴素:将连通图的边按权值从小到大排序,每一步从未选择的边中选择一条权值最小的边, 逐条链接,直到获得最小生成树,在此过程中需要注意的是,判断添加边的过程是否形成环路。
为了使用 Kruskal 算法,下面介绍存储图的另一种数据结构:边集数组。
边集数组是一个 $E$ 行 3 列的矩阵,$E$ 是图的边集合数,存储的格式是:第一列是边的起点编号,
第二列是边的终点编号,第三列是边的权值,如下图。
| 起点 | 终点 | 值 |
|---|---|---|
$v_{1}$ |
$v_{2}$ |
1 |
$v_{1}$ |
$v_{3}$ |
3 |
$v_{2}$ |
$v_{4}$ |
8 |
$\cdots$ |
$\cdots$ |
$\cdots$ |
有了边集数组,Kruskal 算法的实现过程就很简单了。另外,还需要注意的是, 在取新的边时,判断是否会形成环路的方法是,将之前选择过的顶点放到一个集合中, 如果下次选择新的边时,其顶点在集合中,则说明形成回路。
最小生成树 Kruskal 算法的实现如下:
import numpy as np
# 邻接矩阵
M = 99999
graph = np.array([
[0, 1, 3, M, M, M],
[1, 0, 2, 8, M, M],
[3, 2, 0, 7, 3, M],
[M, 8, 7, 0, 5, 6],
[M, M, 3, 5, 0, 6],
[M, M, M, 6, 6, 0],
])
# 邻接矩阵转边集数组
edge_list = []
for i in range(graph.shape[0]):
for j in range(graph.shape[0]):
if graph[i][j] < M:
edge_list.append([i, j, graph[i][j]])
edge_list.sort(key = lambda a: a[2])
# 最小生成树
group = [[i] for i in range(graph.shape[0])]
res = []
for edge in edge_list:
for i in range(len(group)):
if edge[0] in group[i]:
m = i
if edge[l] in group[i]:
n = i
if m != n:
res.append(edge)
group[m] = group[m] + group[n]
group[n] = []
print(f"最小生成树时:{res}")
最短路径问题
最短路径问题在动态规划中通过贝尔曼最优原理及其递推方程求解,这是一种反向搜索方法。
而在阶段不明确的情况下,可以用函数迭代法逐步正向搜索,直到指标函数衰减稳定得到最优解。
这些算法都是基于这个原理建立的,即在图网络分析中,
若 $\{v_{1}, v_{2}, \cdots, v_{n}\}$ 是从 $v_{1}$ 到 $v_{n}$ 的最短路径,
则 $\{v_{1}, v_{2}, \cdots, v_{i}\}$ 也必然是 $v_{1}$ 到 $v_{i}$ 的最短路径($1 \leq i \leq n$)。
用图网络理论来分析最短路径问题也是基于相同的原理,只不过动态规划属于反向搜索方法, 而图分析属于正向搜索方法。图分析中解最短路径问题最常用的算法是 Dijkstra(迪克斯特拉)算法, 也称为 TP 标号法。该算法的主要特点是以起始点为中心向外层扩展(广度优先搜索思想),直到扩展到终点为止。
Dijkstra 算法基本思路
通过 Dijkstra 算法计算图 G 中的最短路径时,需要指定起点 $s$(从顶点 $s$ 开始计算),
此外需要引进两个集合 $P$ 和 $T$。$P$ 的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),
而 $T$ 则是记录还未求出最短路径的顶点(以及该顶点到起点 $s$ 的距离)。
- 初始时,
$P$只包含起点$s$,$T$包含除$s$外的其他顶点, 且$T$中顶点的距离为 “起点$s$到该顶点的距离”,如果$T$中顶点和起点$s$不相邻,则$v$的距离为$\infty$; - 从
$T$中选出距离最短的顶点$k$,并将顶点$k$加入到$P$中,同时从$T$中移除顶点$k$; - 更新
$T$中各个顶点到起点$s$的距离。之所以更新$T$中顶点的距离, 是由于上一步中确定了$k$是求出最短路径的顶点,从而可以利用$k$来更新其他顶点的距离。 例如,$(s, v)$的距离可能大于$(s,k) + (k,v)$的距离。 - 重复步骤 2 和 3,直到遍历完所有顶点。
单出看上面的理论可能比较难理解,下面通过实例来对 Dijkstra 进行讲解,
如下图所示,需要找出一条从起点 $D$ 到终点 $A$ 的最短路径。
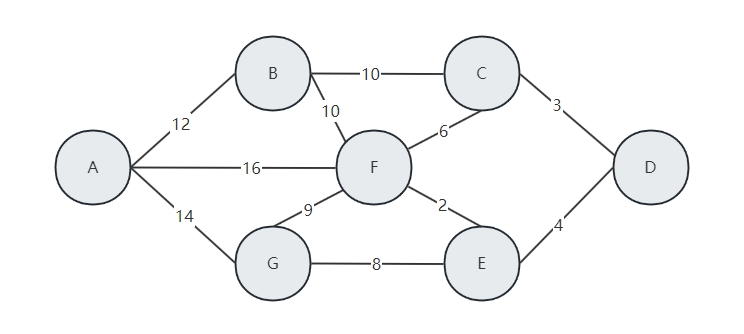
Dijkstra 算法求解最短路径步骤
-
没有选择任何节点,将起点
$D$放入$P$集合中,并计算$D$到起点的路径, 当然$D$到$D$的路径为 0,同时计算其他与$D$相邻的节点到$D$的距离, 与$D$相邻的节点是$C$、$E$,其距离分别是 3、4,其他节点与$D$不相邻, 距离为$\infty$。$$P=\{D(0)\}$$$$T=\{C(3), E(4), F(0), B(\infty), G(\infty), A(\infty)\}$$ -
选择
$T$集合中距离起点$D$路径最小的节点$C$,加入到$P$集合中, 重新计算$T$集合中各节点到起点$D$的距离。由于$E$与$D$相连,故距离不变, 而其余各节点由于没有与$D$相连,故需要计算其与$P$集合中各节点的距离, 从而得到距离$D$的最短距离。$B$与$C$相连,故$B$到$D$的距离是 13。- 注意:
$F$到$D$需要从$P$中选择中转节点,而不能在$T$中选择$E$作为中转节点, 故$F$到$D$($F \rightarrow C \rightarrow D$)的距离是$6+3=9$, 而不是$2+4=6$($F \rightarrow E \rightarrow D$)。
$$P=\{D(0), C(3)\}$$$$T = \{E(4), F(9), B(13), G(\infty), A(\infty)\}$$ - 注意:
-
从
$T$集合中选择距离节点$D$路径距离最短的节点$E$,加入到$P$集合中, 重新计算$T$集合中各节点到节点$D$的最短距离。$$P=\{D(0), C(3), E(4)\}$$$$T = \{F(6), B(13), G(12), A(\infty)\}$$ -
从
$T$集合中选择距离节点$D$路径最短的节点$F$,加入到$P$集合中, 重新计算$T$集合中各节点到节点$D$的最短距离。$$P=\{D(0), C(3), E(4), F(6)\}$$$$T = \{B(13), G(12), A(22)\}$$ -
从
$T$集合中选择距离节点$D$路径最短的节点$G$,加入到$P$集合中, 重新计算$T$集合中各节点到节点$D$的最短距离。$$P=\{D(0), C(3), E(4), F(6), G(12)\}$$$$T = \{B(13), A(22)\}$$ -
从
$T$集合中选择距离节点$D$路径最短的节点$B$,加入到$P$集合中, 重新计算$T$集合中各节点到节点$D$的最短距离。$$P=\{D(0), C(3), E(4), F(6), G(12), B(13)\}$$$$T = \{A(22)\}$$ -
从
$T$集合中选择距离节点$D$路径最短的节点$A$,加入到$P$集合中, 重新计算$T$集合中各节点到节点$D$的最短距离。$$P=\{D(0), C(3), E(4), F(6), G(12), B(13), A(22)\}$$$$T = \{\}$$
# Dijkstra 最短路径问题
# 使用堆(heap)的数据结构,可以简单地认为 heap 就是有序的 list
from heapq import heappop, heappush
def dijkstra(graph_dict, from_node, to_node):
cost = -1
ret_path = []
T, P = [(0, from_node, ())], set()
while T:
# 从 T 中取出距离最近的节点
(cost, v1, path) = heappop(T)
if v1 not in P:
P.add(v1)
path = (v1, path)
if v1 == to_node: # 到达终点
break
# 将新选择的节点 v1 的相邻节点加入到 T 中
for v2, c in graph_dict.get(v1, ()).items():
if v2 not in P:
heappush(T, (cost + c, v2, path))
# 找到路径后进行格式化
if len(path) > 0:
left = path[0]
ret_path.append(left)
right = path[1]
while len(right) > 0:
left = right[0]
ret_path.append(left )
right = right[1]
ret_path.reverse()
return cost, ret_path
def main():
graph_dict = {
"A": {"B": 12, "G": 14, "F": 16},
"B": {"A": 12, "C": 10, "F": 7},
"C": {"B": 10, "D": 3, "F": 6},
"D": {"C": 3, "E": 4},
"E": {"D": 4, "F": 2, "G": 8},
"F": {"A": 16,"B": 7, "C": 6, "E": 2, "G": 9},
"G": {"A": 14, "F": 9, "E": 8},
}
from_node = "D"
to_node = "A"
dijkstra(graph_dict, from_node, to_node)
网络最大流问题
车辆路径规划问题
Vehicle Routing Problem, VRP, 车辆路径问题
车辆路径规划问题简介
车辆路径规划问题(Vehicle Routing Problem, VRP)最早由 George Bernard Dantzig 于 1959 年提出。 该问题是一个非常经典的组合优化问题。VRP 在实际生产制造活动中存在大量应用场景, 例如物流、交通运输、生产线管理、航线设计、港口管理、航空、管理运输、军事后勤等。
基本的 VRP 通常可以描述如下:某区域内存在一定数量的客户和一个配送中心或车场, 客户一般分布在不同位置,每个客户都有一定数量的货物配送需求。 配送中心或车场需要派出车队并且为其设计合适的配送方案以完成所有客户的货物配送需求。
VRP 的目标 是在满足所有客户需求的前提下,使得效益最优化。效益的衡量方法通常以目标函数的形式呈现。 目标函数随着企业要求的变化而变化,常见的目标函数有最小化车辆的总行驶距离、最短配送总时间、最小化使用的车辆数等。
除了满足客户的配送需求外,VRP 一般还需要考虑其他 多种约束,由此诞生了多种变体。 例如,考虑车辆的载重不能超过其最大装载量(容量), 则问题变成 带容量约束的车辆路径规划问题(Capacitated Vehicle Routing Problem, CVRP); 若考虑每个客户的配送需求必须在某个特定的时间范围之内送达, 则问题变化为 带时间窗的车辆路径规划问题(Vehicle Routing Problem with Time Windows, VRPTW)。
算法实现
CVRP
读取数据:
# 读取算例,只取前 15 个客户点
f = open("r101.txt", "r")
sth = f.readlines()
# 存储数据,并打印数据
data = []
for i in sth:
item = i.strip("\n").split()
data.append(item)
N = len(data)
for i in range(N):
for j in range(len(data[i])):
print(data[i][j], end = "\t\t")
data[i][j] = int(data[i][j])
print()
# 计算距离矩阵,保留两位小数,并打印矩阵
Distance = [
[
round(math.sqrt(sum((data[i][k] - data[j][k]) ** 2 for k in range(1, 3))), 2)
for i in range(N)
] for j in range(N)
]
for i in range(len(Distance)):
for j in range(len(Distance[i])):
if i != j:
print(Distance[i][j], end = "\t\t")
print()
# 读取算例中的需求例
Demand = [data[i][3] for i in range(N)]
Callback 部分:
from gurobipy import GRB
# 该函数的目的是找到当前整数解中存在的一个子环路
def getRoute(x_value, K):
x = copy.deepcopy(x_value)
routelist = {}
for k in range(K):
Route = []
A = True
for i in range(1, N):
if i != j and x[i][j][k] >= 0.01:
R.append(i)
R.append(j)
Cur = j
Count = 1
while (A != False): # 以某个起点开始遍历该路径是否为子回路
for l in range(1, N + 1):
if Cur != l and x[Cur][l][k] >= 0.01:
R.append(l)
if R[0] == 1:
A = False
Route.append(R)
break
if l == N:
A = False
break
Cur = 1
Count += 1
routelist[k] = Route
return routelist
def subtourlim(model, where):
"""
该函数就是 Callback 方法,每次调用都会将当前解中的子回路找到,
并将子回路的约束加回模型再次求解
"""
if (where == GRB.Callback.MIPSOL):
x_value = np.zeros([N + 1, N + 1, K])
for m in model.getVars(): # 获取当前 xijk
if (m.varName.startswith("x")):
a = (int)(m.varName.split("_")[1])
b = (int)(m.varName.split("_")[2])
c = (int)(m.varName.split("_")[3])
x_value[a][b][c] = model.cbGetSolution(m)
tour = getRoute(x_value)
print(f"tour = {tour}")
for k in range(K): # 将当前子回路的约束添加回模型
for r in range(len(tour[k])):
tour[k][r].remove(tour[k][r][0])
expr = LinExpr()
for i in range(len(tour[k][r])):
for j in range(len(tour[k][r])):
if tour[k][r][i] != tour[k][r][j]:
expr.addTerms(1.0, x[tour[k][r][i], tour[k][r][j], k])
model.cbLazy(expr <= len(tour[k][r]) - 1)
CVRP1-1:
from gurobipy import *
# 读取算例,只取前 15 个客户点
f = open("r101.txt", r)
# 设置车辆数 K
K = 3
# 开始在 Gurobi 中建模
def CVRP1_1(N, K, Distance, Demand):
pass
# 调用函数对模型 CVRP1-1 进行建模和求解
CVRP1_1(N, K, Distance, Demand)